代替わり
今月初めに行われた成果発表で代替わりをして、ゼミ長になりました鎌倉です。 現在1年生全員がある程度プログラムの知識をつけるべく講習会を開いています。代替わりに際して新たにその講習会を企画、運営する会長という役職を設けまし … “代替わり”の続きを読む
今月初めに行われた成果発表で代替わりをして、ゼミ長になりました鎌倉です。 現在1年生全員がある程度プログラムの知識をつけるべく講習会を開いています。代替わりに際して新たにその講習会を企画、運営する会長という役職を設けまし … “代替わり”の続きを読む
ゼミ長の武内です。 私たちt-semiの所属する東北大学では毎年11月のはじめに学祭が開催されます。 t-semiは毎年参加し、ロボットや趣味で作った様々なものを展示したり遊んでもらったりしています。 去年はボールを飛ば … “学祭”の続きを読む
本日の10時05分からNHKテレビでNHKロボコン2014の放送がありました。 みなさんご覧になられたでしょうか? あ、寝過ごしたという方はきっと誰かが録画しています。 まずは優勝した名古屋工業大学をはじめ、参加した学校 … “NHKロボコン2014放送”の続きを読む
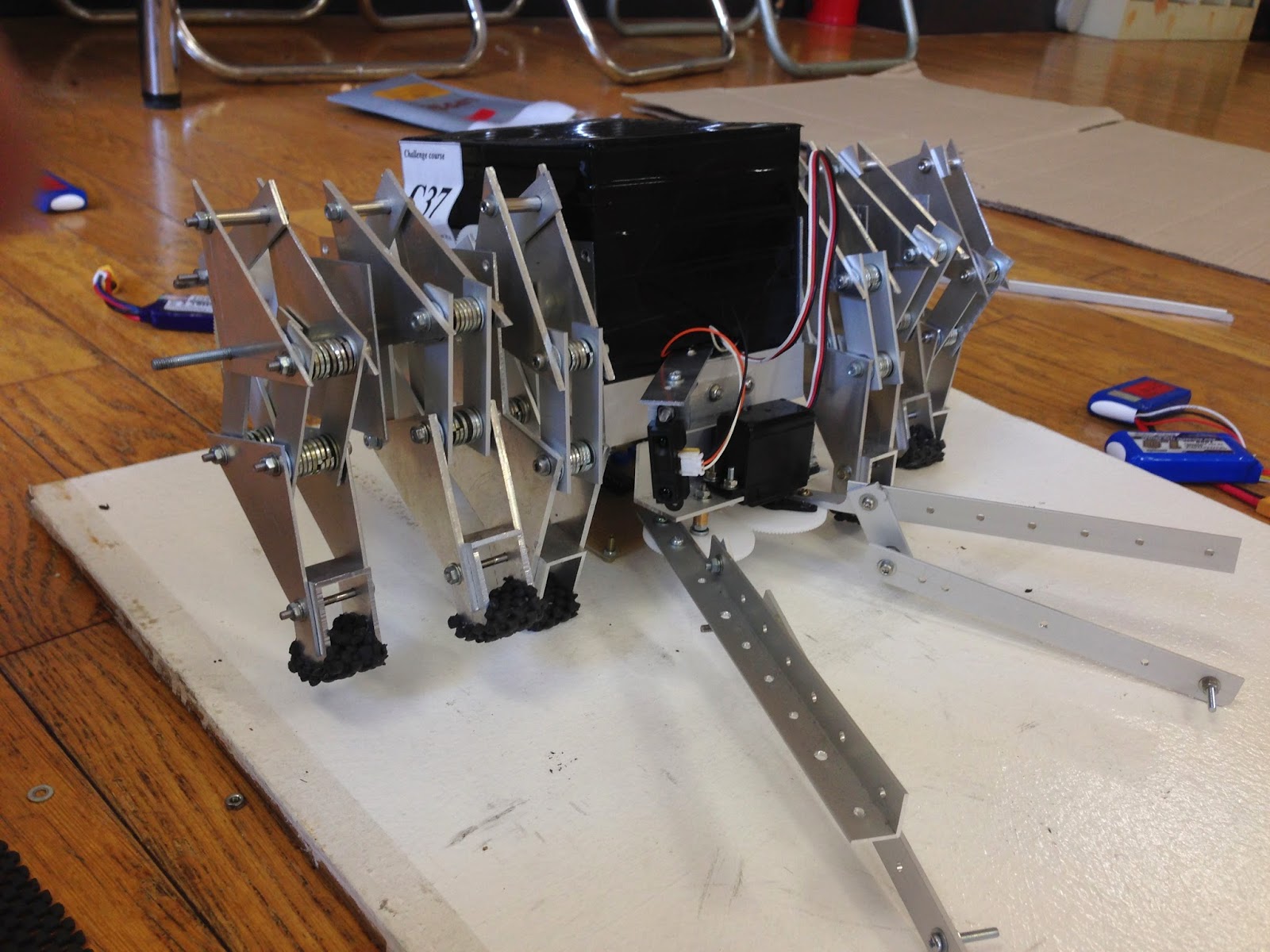
少々報告が遅れましたが,InRoF(仙台知能ロボコン)に出場した「チーム@2か月」です. ちなみにチーム名の由来は2か月前から製作を開始したのではなく, いろいろあって2か月前にチームが結成されたからです.製作はもっと前 … “InRoF 2014 C37 おろぽん by チーム@2か月”の続きを読む
知能ロボコン、チャレンジコースに出場しました、Justin&Lucyの製作者、katoです。 圧縮空気を使用した分離&投げ込みロボットの2代目のマイナーチェンジ版で挑んだ今回の知能ロボコンでは、 自身初の決勝進出 … “InRoF 2014 C07 Justin&Lucy”の続きを読む
参號です。 最近T-semi部内でQtを使い始めようかなという人が増えてきました。 私もその一人で趣味として某艦隊シミュレーションゲーム、艦隊こ○くしょんの専用ブラウザを作ったりして楽しんでいます。 LinuxユーザやM … “Qtで使うOpenSSL のビルドについて”の続きを読む

知能ロボコンに出場しました, アルサイクロクリーナーの製作者, こばとんです. 得点はあまりできなかったのですが, 掃除機が競技台を疾走し, ボールを回収するというインパクトが評価され (?), アイデア倒れ賞と最優秀ビ … “InRoF 2014 C40 アルサイクロクリーナー”の続きを読む
5月31日、6月1日の2日間、東京の渋谷区で行われたNHK大学ロボコンの 見学に行ってきました。今年の課題は「A SALUTE TO PARENTHOOD」。 詳しい説明は避けますが、去年の課題などと比べても難しく感じら … “NHKロボコン”の続きを読む

近年、優秀な二次電池として一般にも普及しているLiPo電池ですが、 T-Semiにおいてもロボットの動力源として利用されています。 内部電源のロボットを作るときに非常に便利な電池ですが、メリットがあれば 当然デメリットも … “金属消火器”の続きを読む
さて、InRoFの登録が締め切られました。 参加する方々は無事登録できたでしょうか。 届いたメールによると今年は90チーム程、登録しているようです。 非常に数が多いので(毎年の事ですが)、14日の時点で提出画像を 審査し … “InRoF登録”の続きを読む