こんにちは。去年11月からゼミ長をやっている、いむです。
6/15(土),6/16(日)に開催された知能ロボコン(InRoF)に,T-semiから5チームが出場しました.

各チームそれぞれ個性的な機構で面白い動きを披露していましたが,惜しくも2日目に進むには至りませんでした.
大会の様子はhttps://www.youtube.com/watch?v=aSYGPxeNosIで見ることができます
また,恒例のじゃんけん大会ではなんとOriental Motor社製ギヤードステッピングモータを勝ち取りました!! 来年のInRoFで使いましょうかね
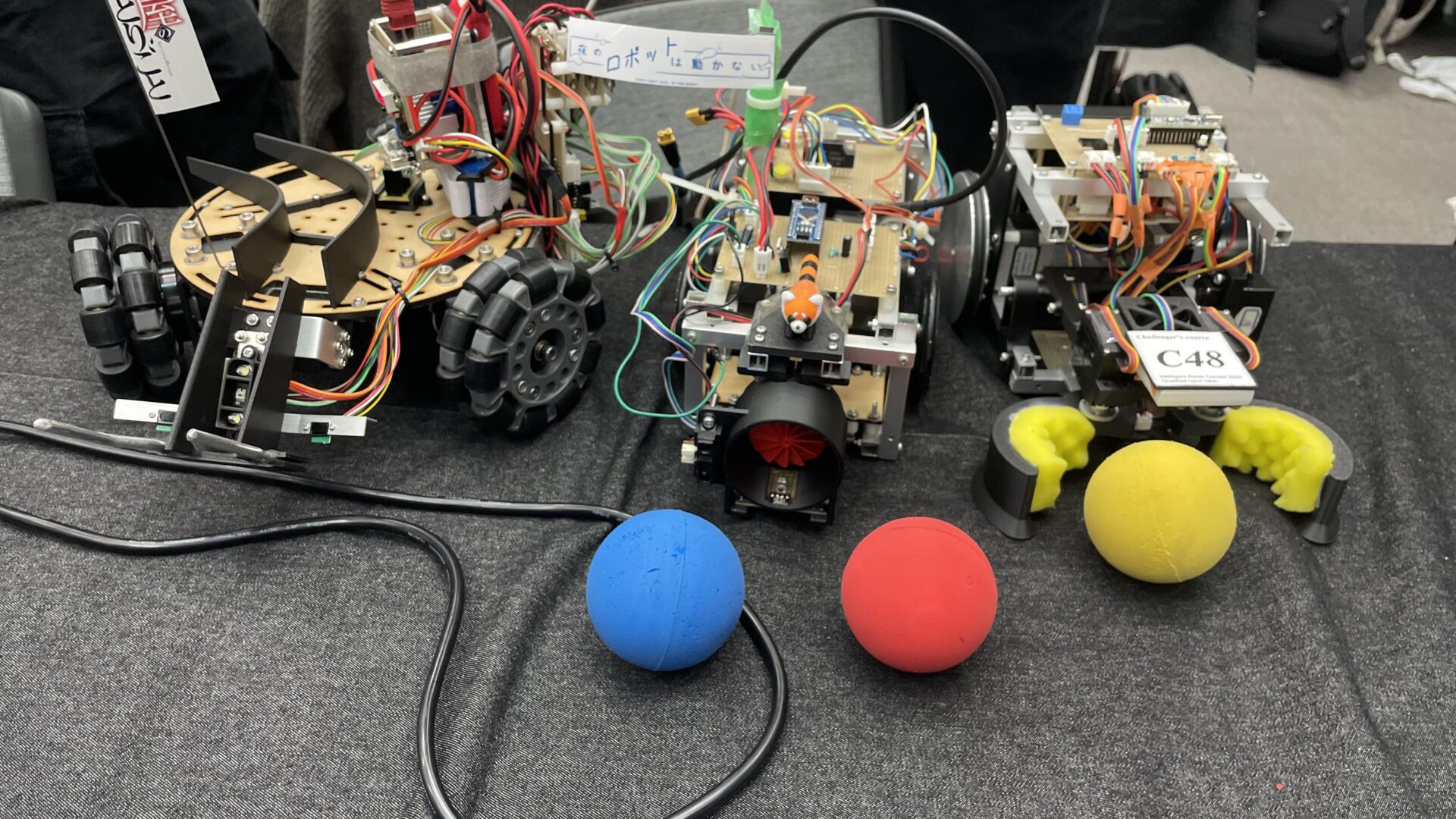
というわけで,ここで各チームのアイディアや機体を紹介していきます.
Team 1 「突貫工事 T-semi 01」
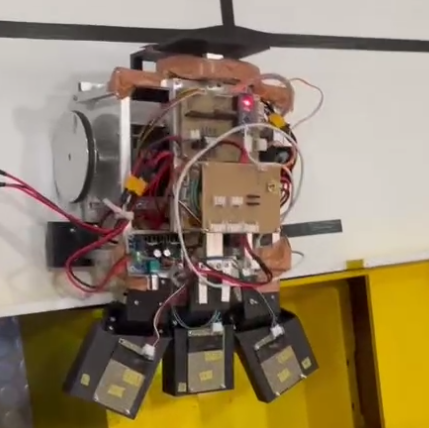
Team 1~4は新入生チームの機体です.放射状に並んだ吸引機構が特徴的です.
予選では自由ボールの5点のみでしたが,後から試走台で動かしたら自由ボール以外のボールが入ったようで…
DCDCコンバータの設定ミスという非常に悔しい結果だったので,改良されて学祭で展示されることに期待ですね
Team 2 「C4-NO2 二酸化窒素」

吸引ファンがひとつ.車輪にはT-semiロゴがあったりレッサーパンダが乗っていたりと,デザインに凝った機体ですね.
ライントレースに入るまでの直線区間で制御が上手くいかなかったのが惜しいところですが,こちらも学祭までに改良したいとのことですので期待です
Team 3 「オリボラ たまごかけごはん」
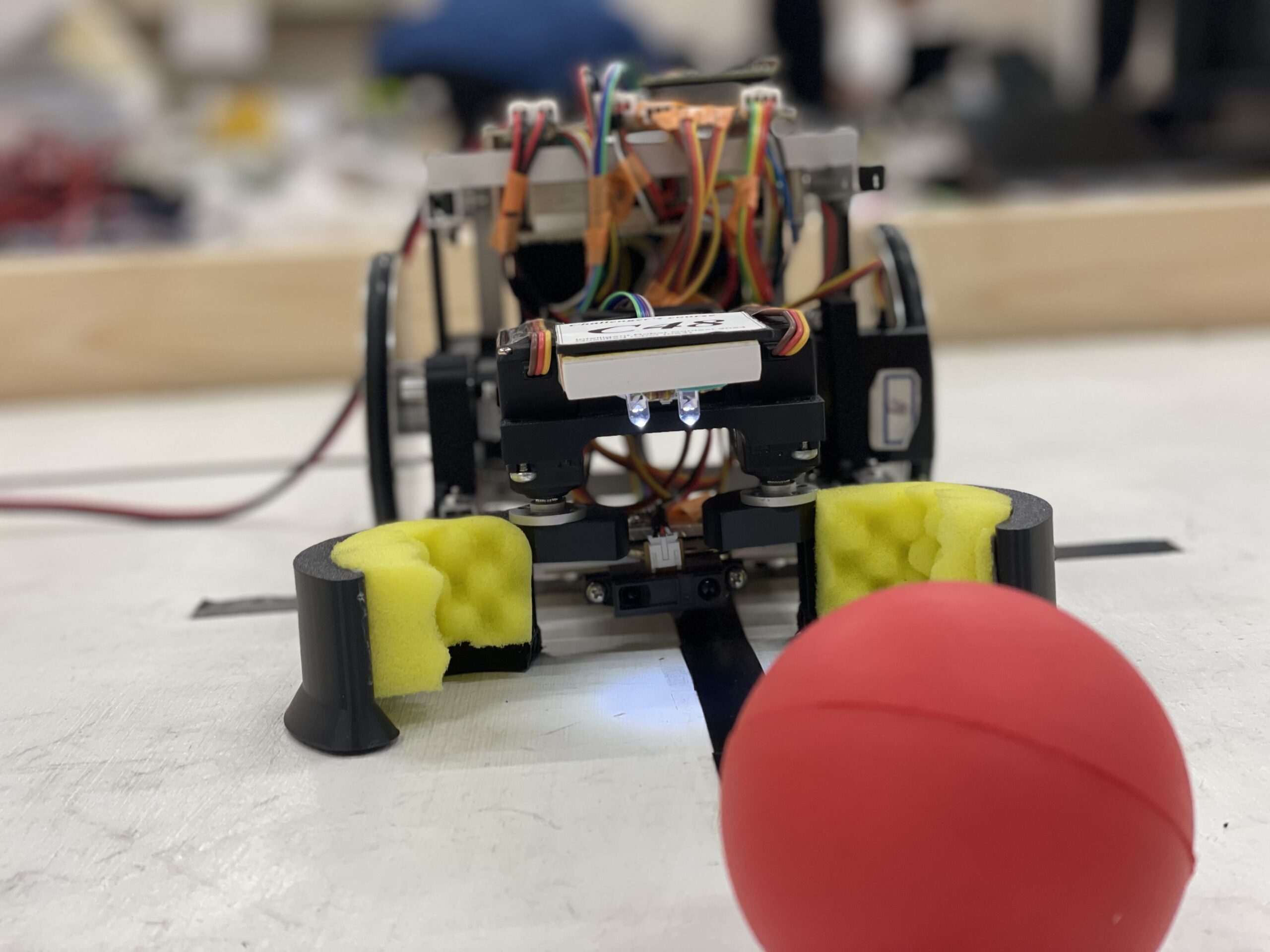
この機体はアームでボールをキャッチする方式,スポンジが結構いい働きをします.
敗者復活戦では赤ボールを認識してキャッチした瞬間にタイムアップしてしまったので,あらためて動いているところを見たいですね.
Team 4 「エレベーター SYSGM」
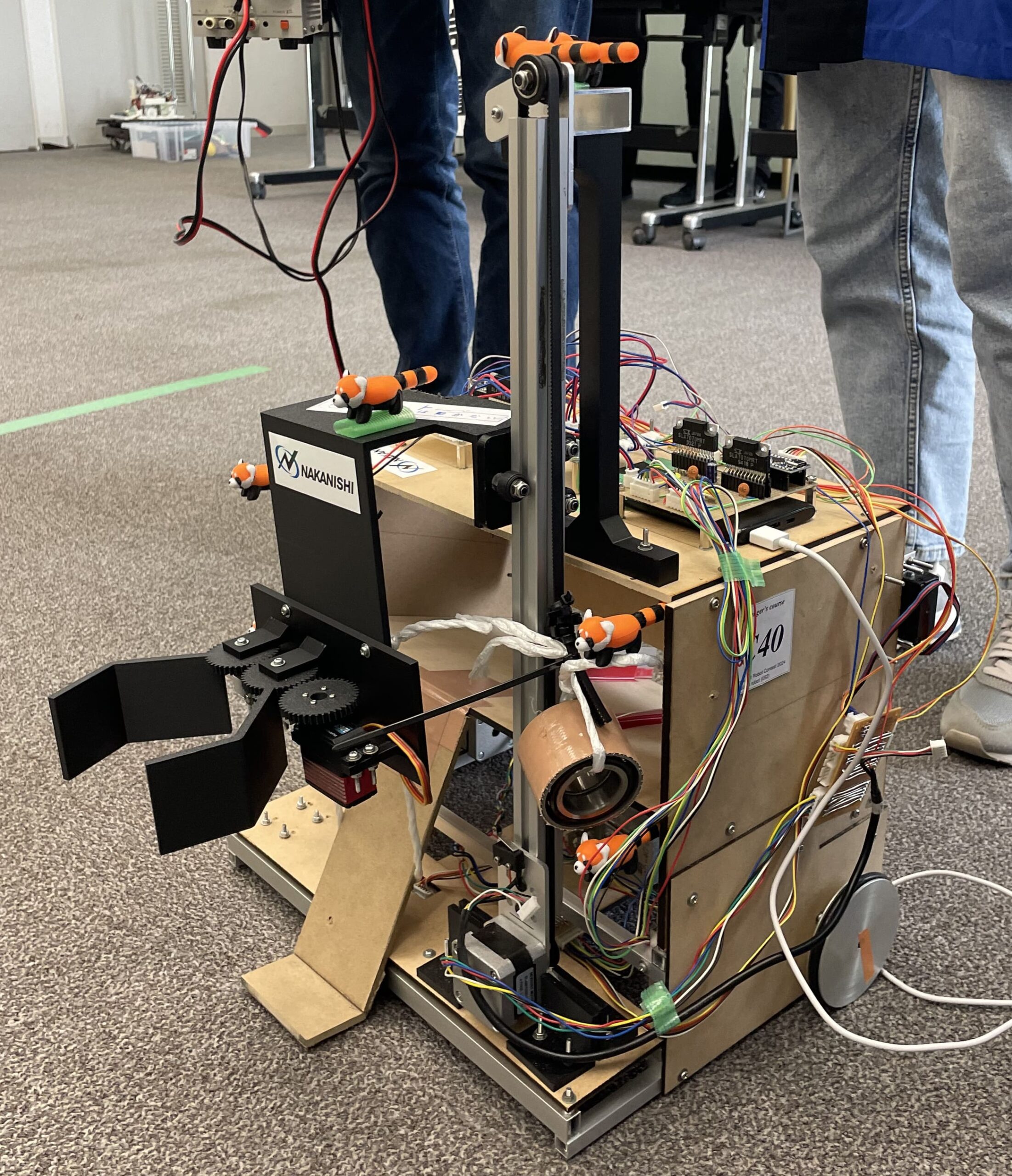
デカいですね.大量のレッサーパンダが乗ったり刺さったりしていますが,それはともかくこの機体のコンセプトは「エレベータ」なんです.
すべてのボールを色ごとに分けて機体に収容した後に一気に吐き出すというなかなか斬新なアイディアで制作を始めましたがいかんせん重すぎて動かず…
結局,ボールを逐次アームでつかんで持っていく形式になりました.
Team 5 「なるべくシンプル号 ゴーストインザラボ」

こちらは上級生チームの機体です.チームとは名ばかりですべてワンオペで開発していたのには驚きです.
大会運営の方も仰っていましたが,会場の照明とToFセンサの相性が良くないようで誤作動を起こしてしまいました…
ちなみに現在この機体は絶賛改良中です