NHK学生ロボコン2026のR2機体の全体設計をしていた井出です。惜しくも本選出場がかなわず、悔しい限りです。
そこで、約8か月の間にR2に詰め込んだ技術を隅から隅までまとめたいと思います。ブログに掲載することを想定しています。
R2要件
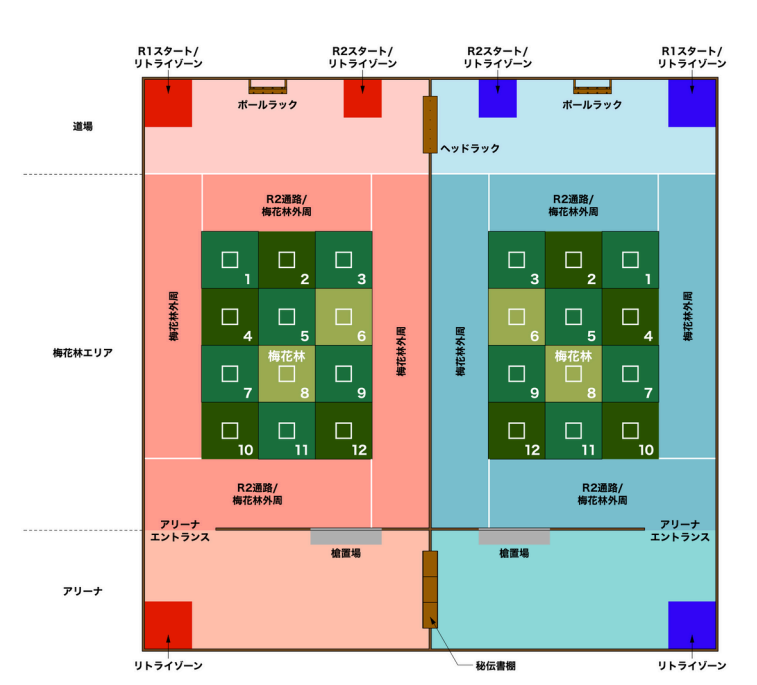
まずは本大会でR2(自動機)が求められていたことを確認します。
- (1)ヘッドラックに刺さっているスピアヘッドを一つ引き抜く
- (2)R1(手動機)と協力して、スピアヘッドとポールを合体させる
- (3)梅花林エリアの段差を進みつつ、KFSを回収する
- (4)KFSの秘伝書棚(中段、上段)への配置
- (5)自立走行
改めて、タスク量が多く、難易度が難しいルールだなぁと思います。
サイズ制限
それぞれのロボットには初期制限と最大展開制限が定められており、それぞれ、
初期制限:幅800×奥行800×高さ1000㎜以内
最大展開制限:幅800×奥行1300×高さ1300㎜以内
と設定されています。これが絶妙な設定で、自分はKFSを機体内部にスタックするという選択をしてしまい、ずっと苦しめられました。
機構の概要
R2の要件を確認できたので、次は、ではどのような機構でこれらを達成しようとしていたのか、設計時に何を考えていたのかを簡単に見ていきます
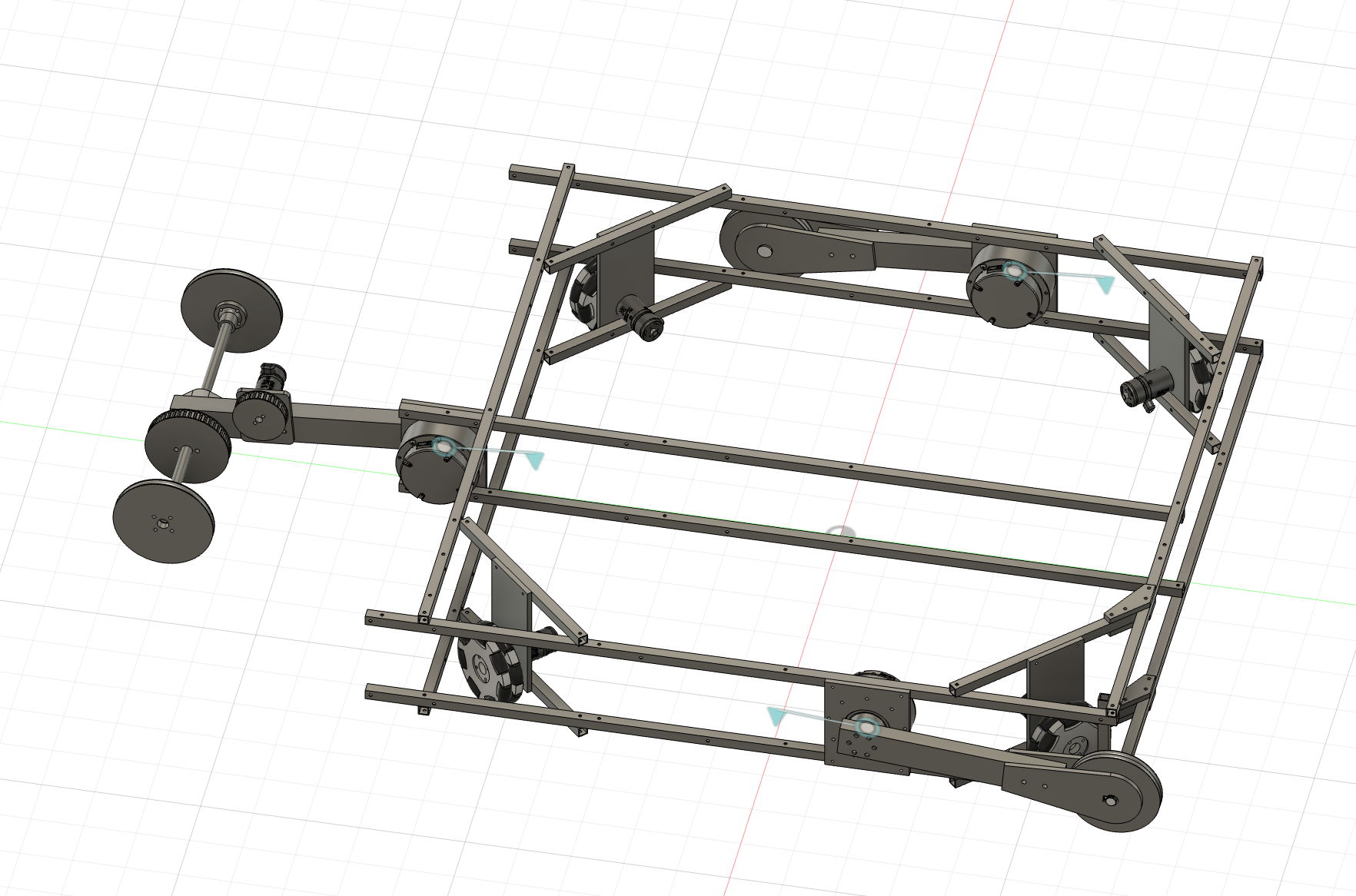
足回り
4輪オムニホイールを採用しており、アクチュエータにはロボマスモータM2006を使っています。オムニとロボマスは、ハブ一つのみよって接続されています。軽量化のためにオムニホイールを採用することは早い段階で決まっていましたが、インホイールオムニを開発する余裕はなく、このような構成になっています。
機体全体が乗降する時、一番最初に負荷を受け止めるのがロボマスのシャフトという、極めてよろしくない設計になっているのは反省点です。
足回りフレームは、必要最小限のアルミフレームで構成することを意識していました。下の画像が足回りのみのフレーム群で、これにR1との合体フレーム、スピアヘッド回収機構と合体させることで3点どめがされ、筐体として剛性が出るようになっています。
段差越え機構
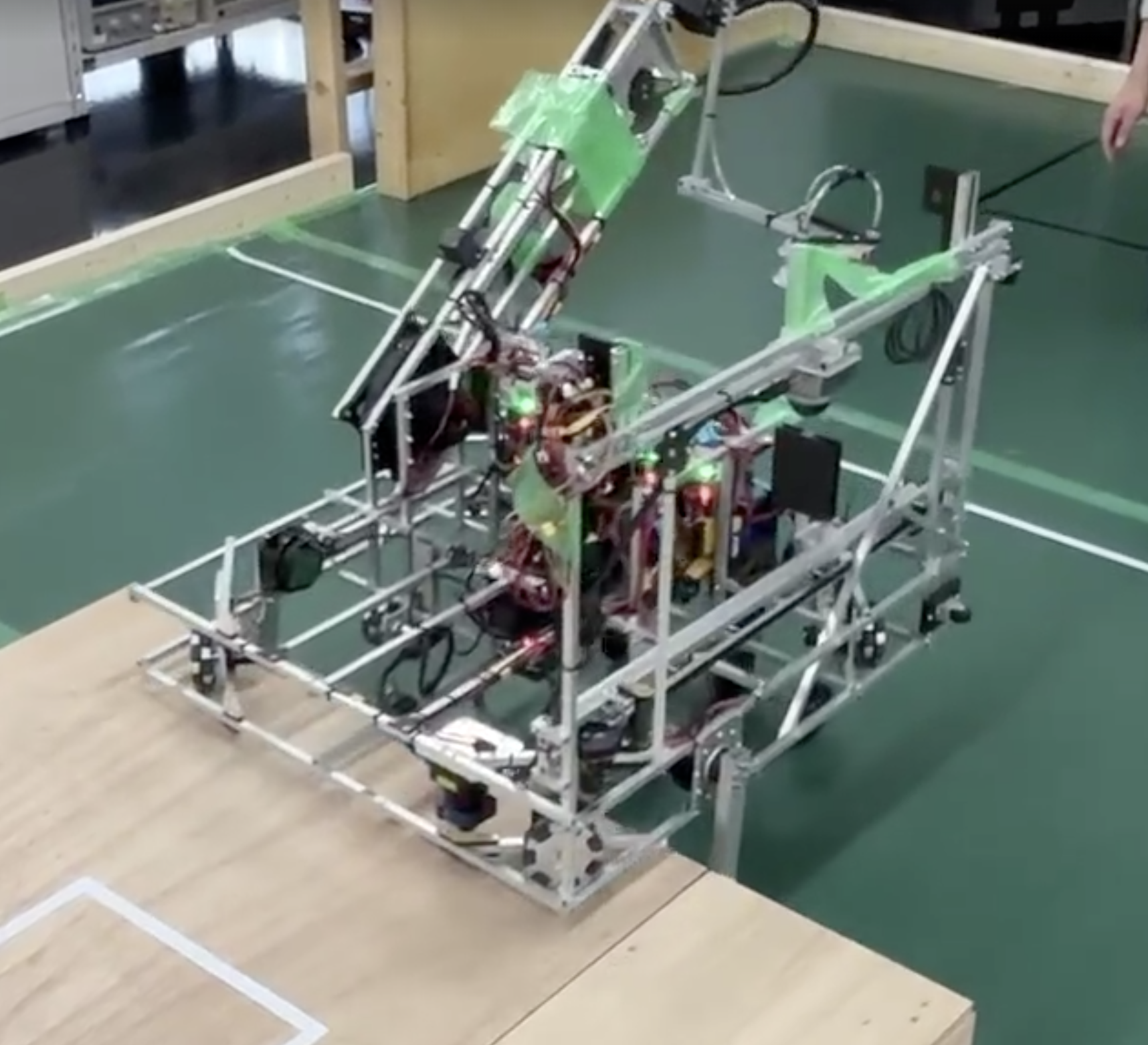
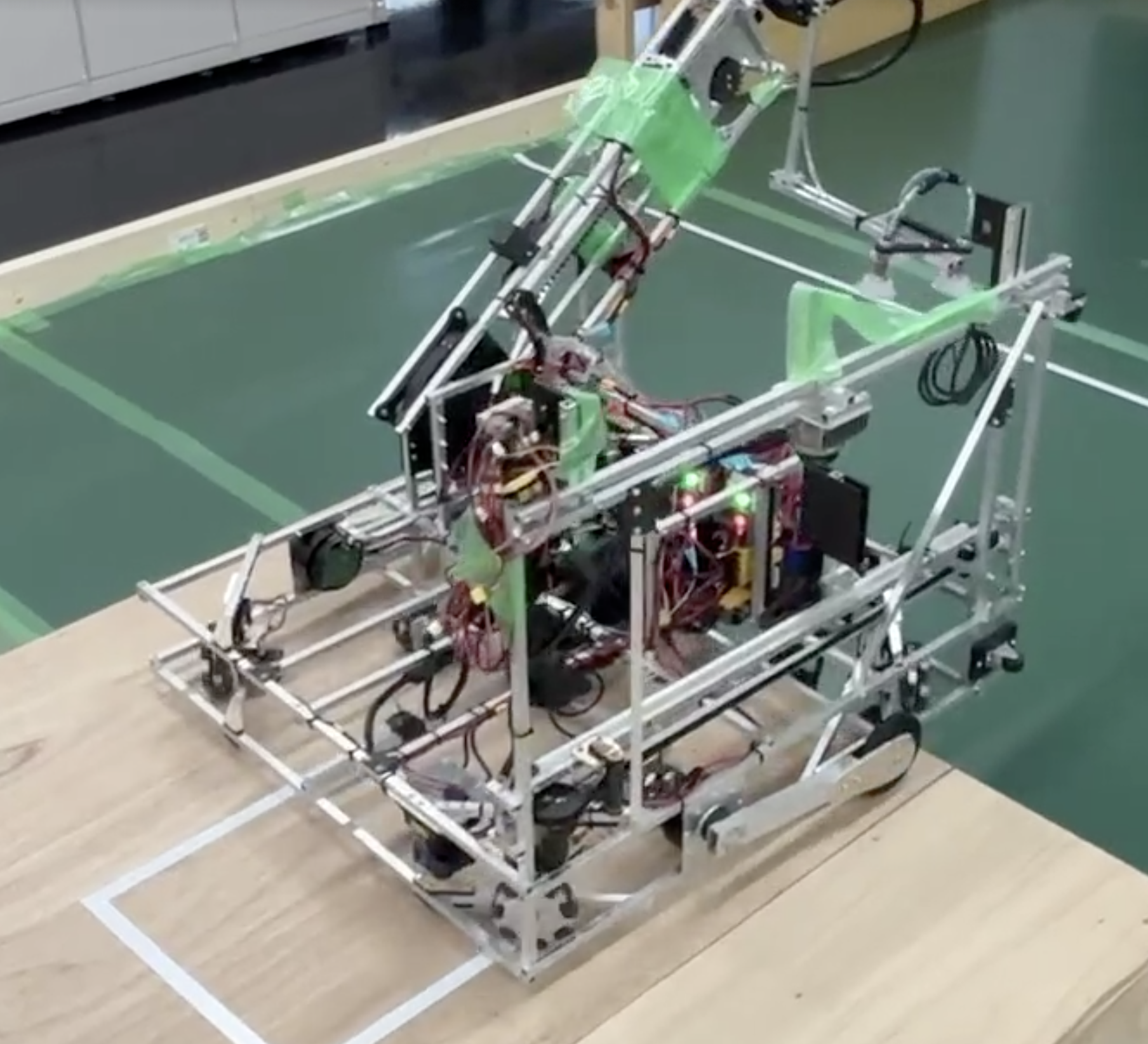
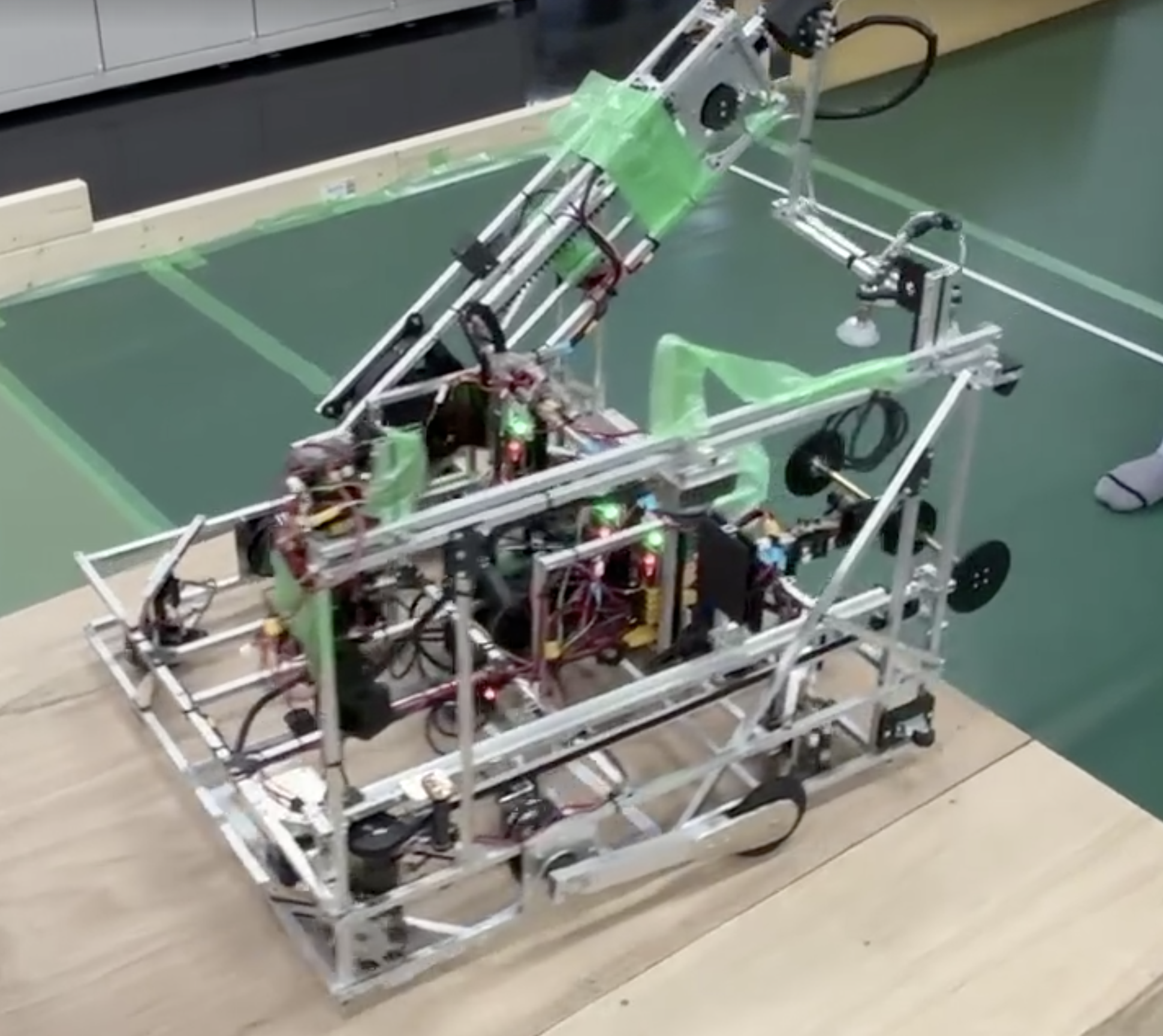
機体左右と機体後方についている足を動作させて、機体全体を200mm+α持ち上げます。後ろ足が駆動し、持ち上がった機体を前進させます。アクチュエータには、ROBSTRIDE02を三つ使っています。最大トルクが17N・mなので、理論上8.6kg×3 = 25.8kg持ち上げられます。
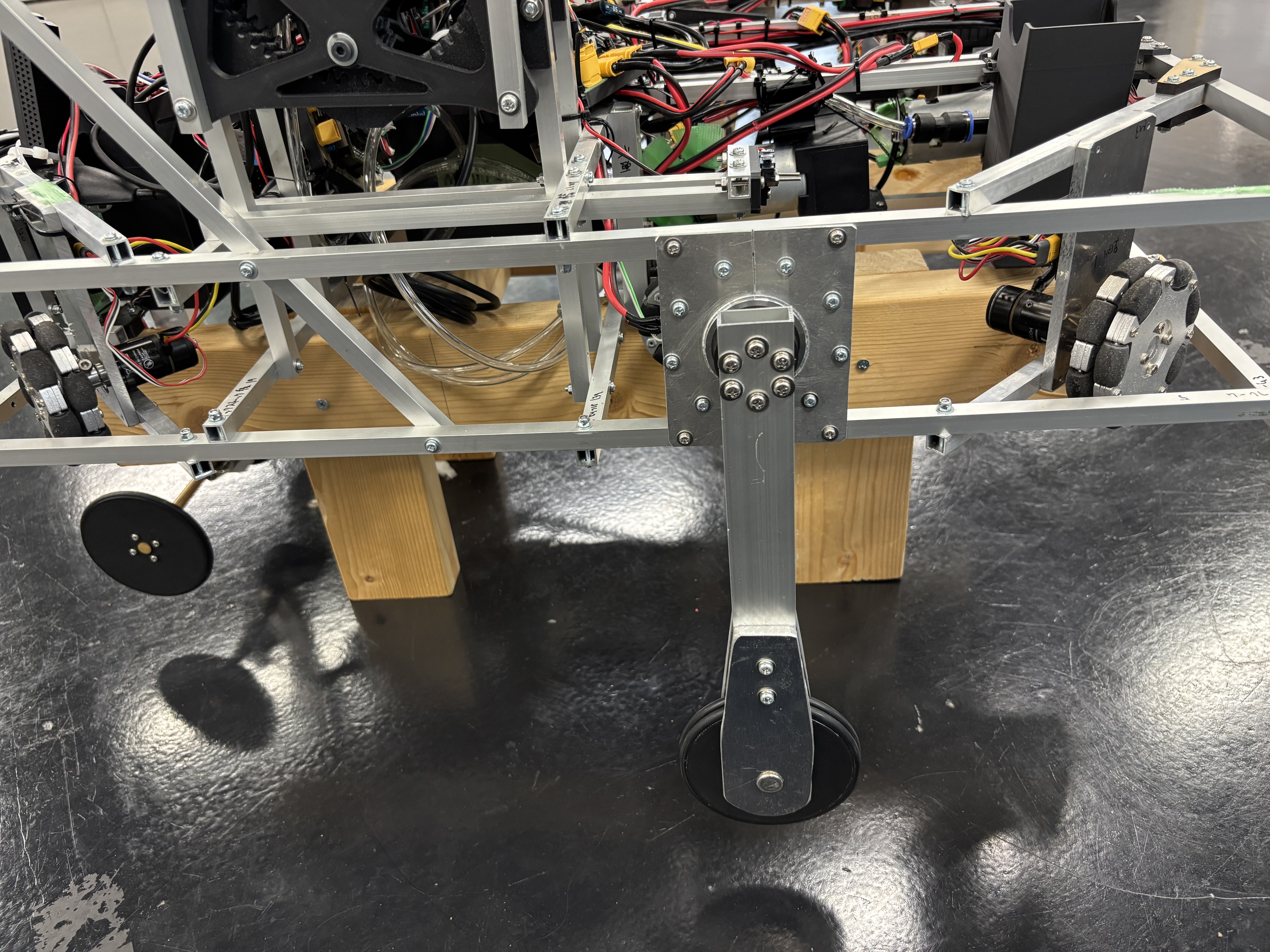
下の画像のように、順番に足を折りたたむことで段差越えをします。
この機構を立案、設計した意図としては、最小限のアクチュエータかつ、簡単な機構でスムーズな段差越えをしたいというものです。最終的に段差越えのためにアクチュエータを4つ使っているので、なんとも言えませんが、簡単な機構で、取り外しも容易ではあったと思います。段差越えのスムーズさについては、足を折り畳んだり伸ばしたりするタイミングがシビアで安定したものではありませんでした。機体の底にローラーを付けて許容される誤差が大きい設計にする、あらかじめ最適な位置にセンサを配置した設計にする、などが反省点ですね。また、アームの位置によって機体重心が変化し、昇降がぎこちなくなるという問題も起きていました。重心を意識した設計をしたいです。
実は、全く異なる段差越え機構を機構班の同期が設計していました。(こちらのおまけ部分)最終的に自分の案が採用されましたが、最後までどちらの案が最適かわかりませんでした。本戦で見られる他大学のロボットが楽しみです。
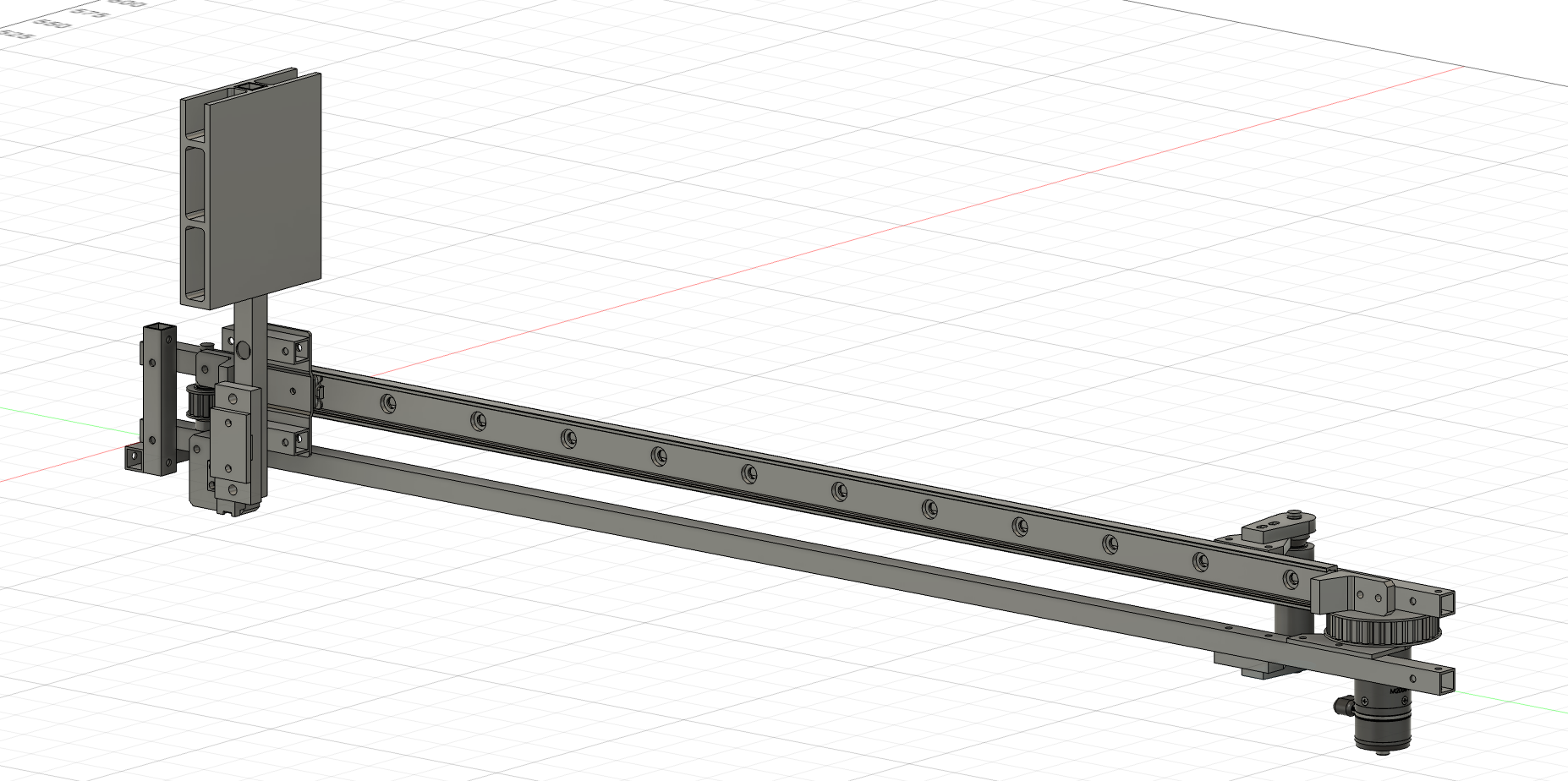
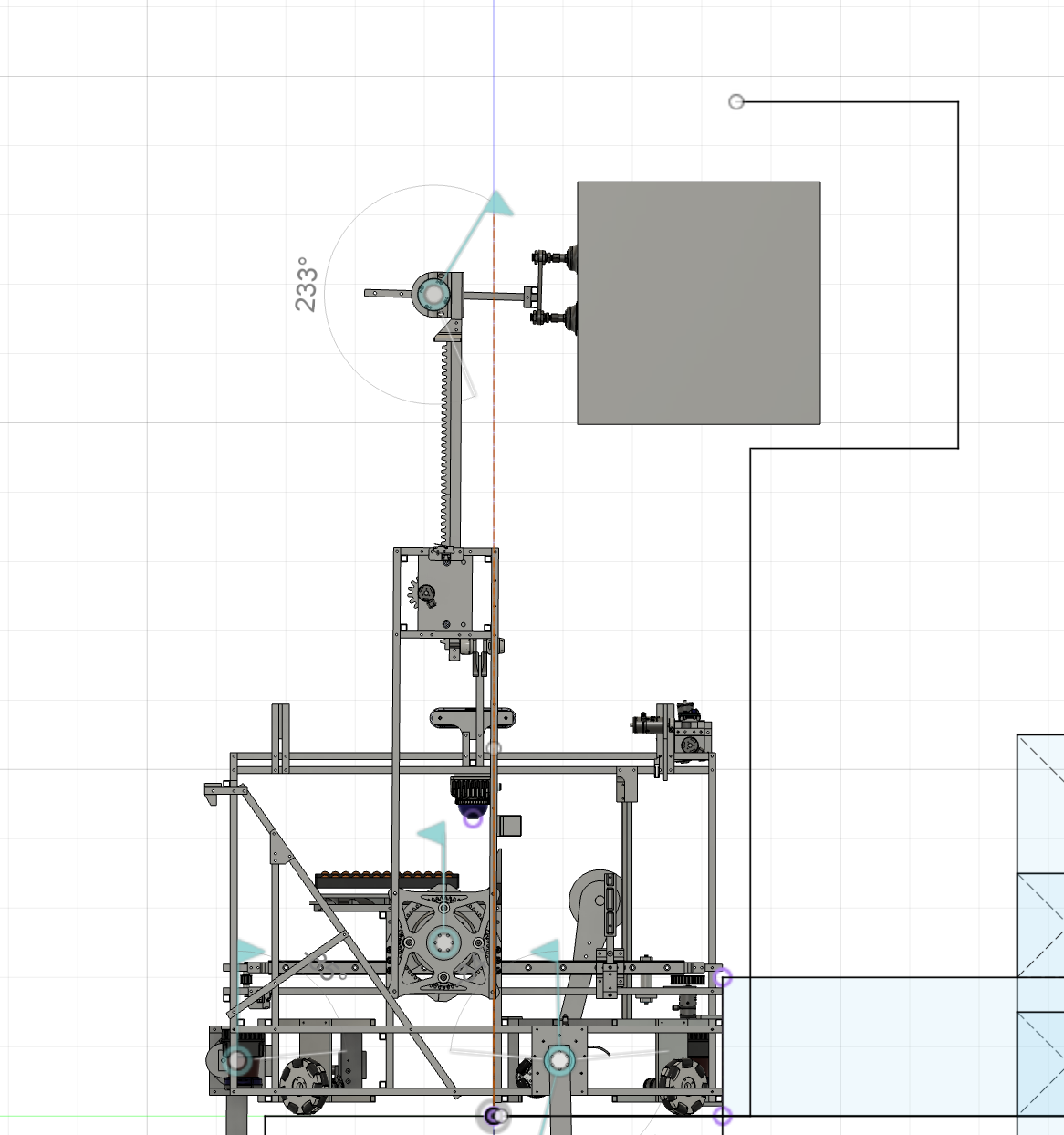
スピアヘッド回収ハンド、武器合体用直動壁
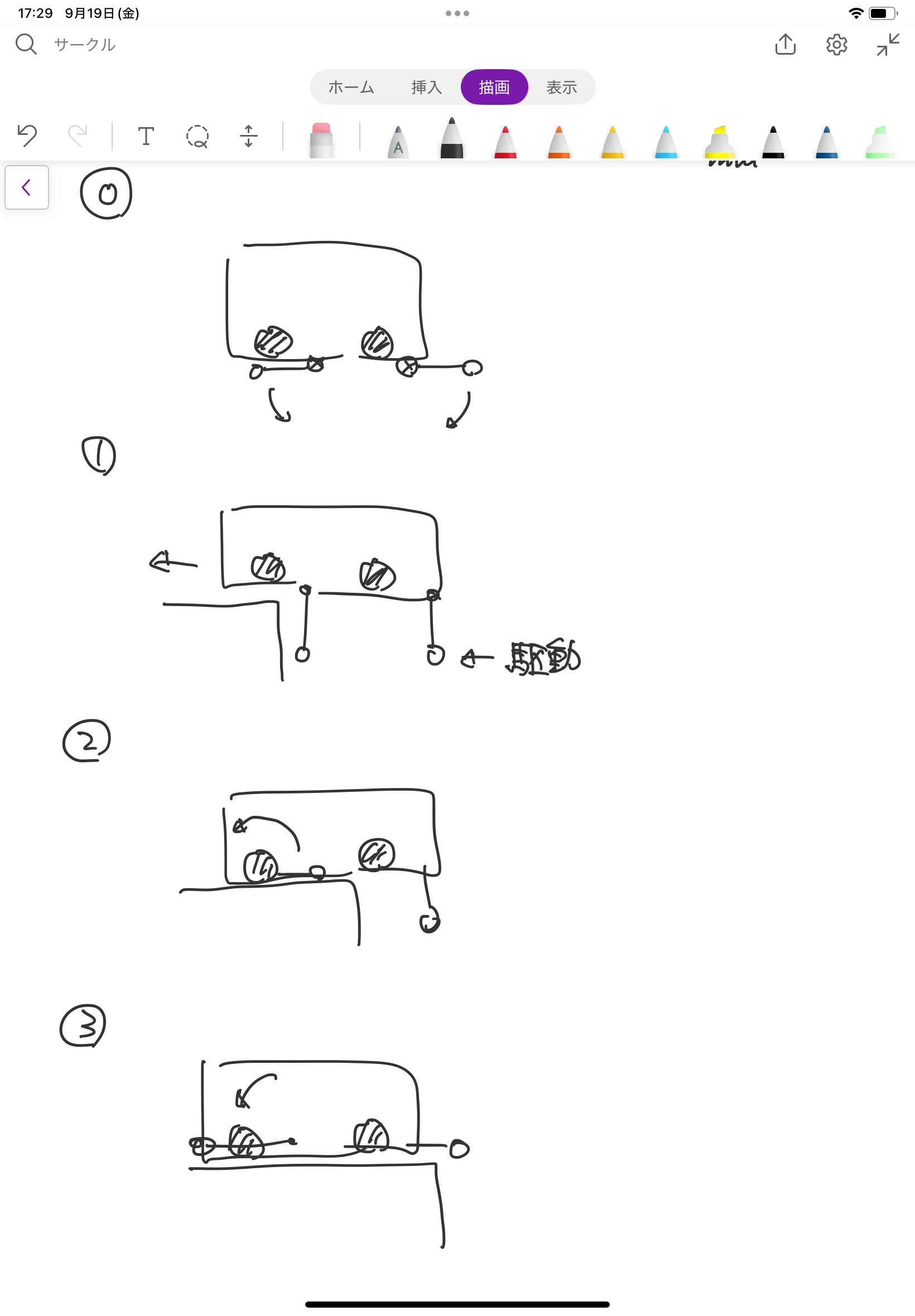
図①のようにヘッドラックからスピアヘッドを回収し、図②のような位置に移動させ、動く壁を移動させて位置を固定します。その状態でR1にポールを挿入してもらい、武器を完成させます。この動きを実現させるために、M2006を3つ使っています(動く壁を合わせると4つ)。
このような動作が必要になったのは、採用した機構ではKFSを機体内にストックしなければならない&段差越え機構により機体側面に何も配置できない、という厳しい条件があったためです。設計した後輩には苦労をかけました。
動く壁も限られたスペースで動作する機構を意識しました。また、リニアレールとタイミングベルトの構成により、どのような形状のスピアヘッドをどちら側からでも押さえることができます。
(※鏡写のフィールドになっているため、フィールドごとにスピアヘッド回収機構の取り付け位置を変更する作戦でした。そのため、スピアヘッドの押さえである動く壁は高い自由度を求められていました。)
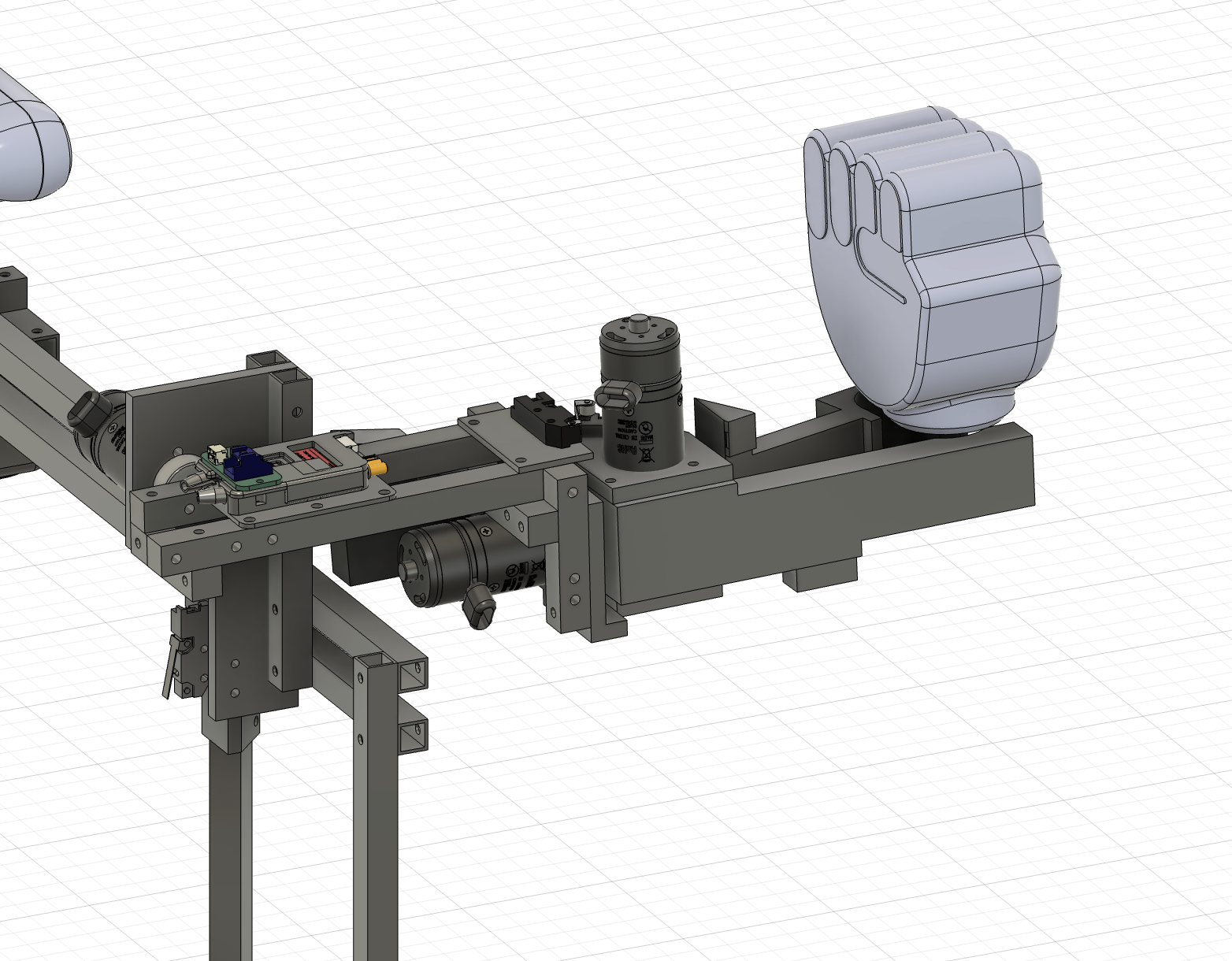
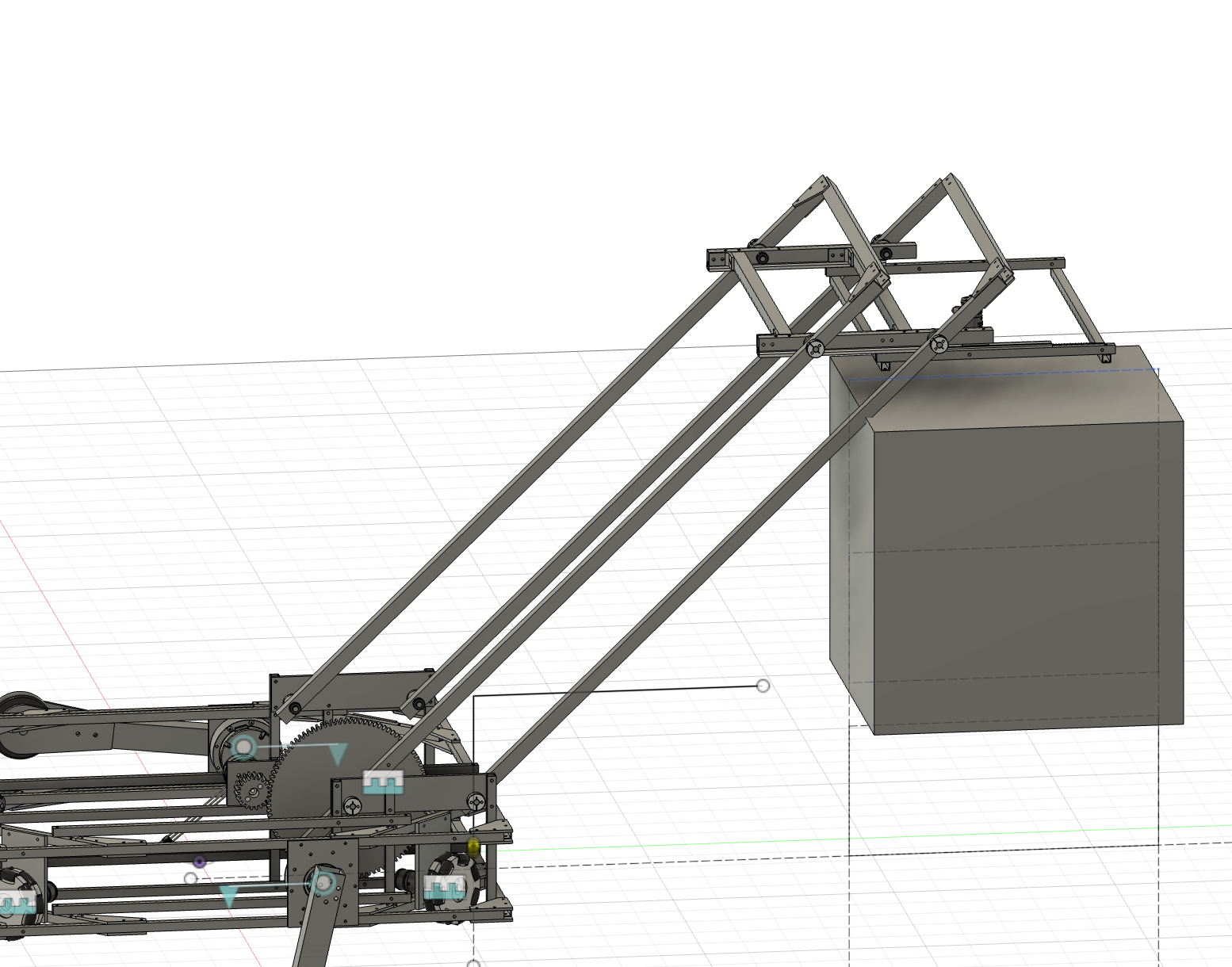
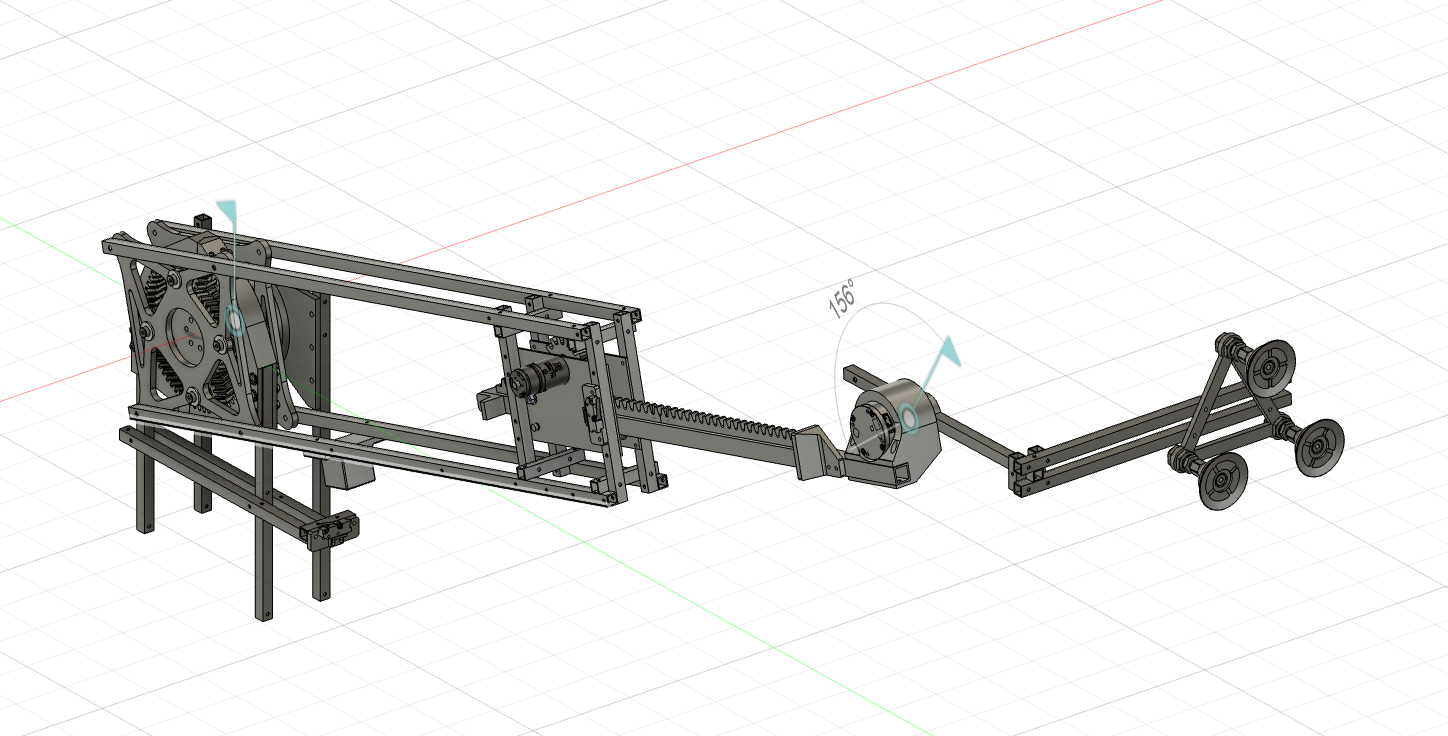
KFS回収/スタック/配置アーム
KFSを回収、スタック、配置するアームです。アクチュエータは、ROBSTRIDE02、EDULITE05、ロボマスM2006、で構成されます。詳しくは後述しますが、2回転、1直動の三軸アームです。アームの先端には、吸盤が取り付けてあります。以下の画像のような手順でKFSを回収します。画像では自分より上の段にあるKFSを回収していますが、どの高さにあるKFSも回収することができます。
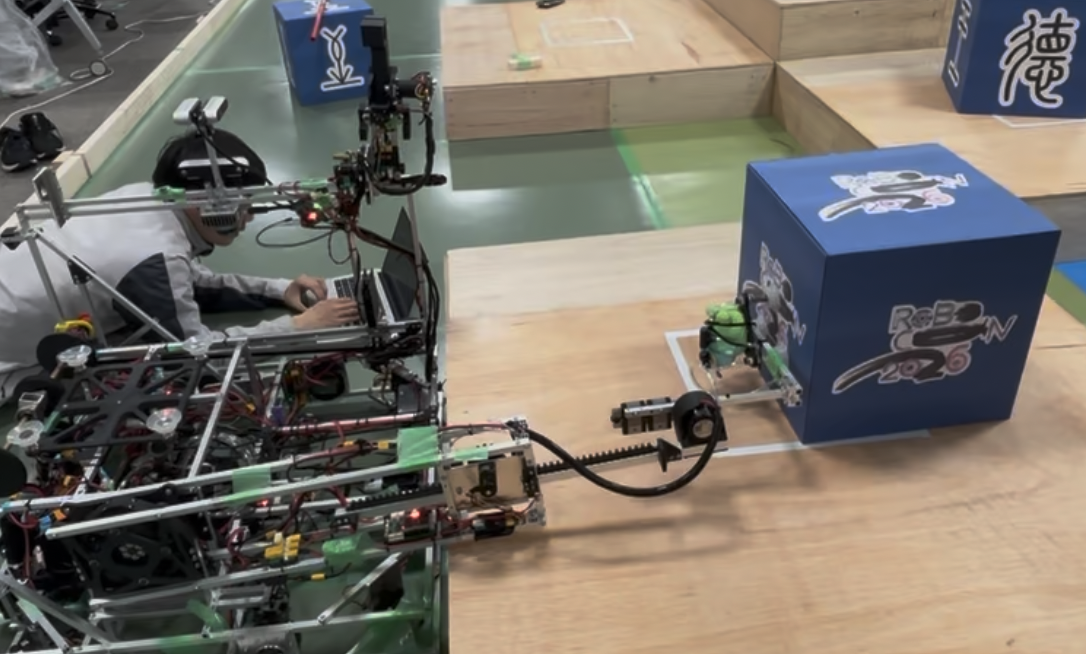
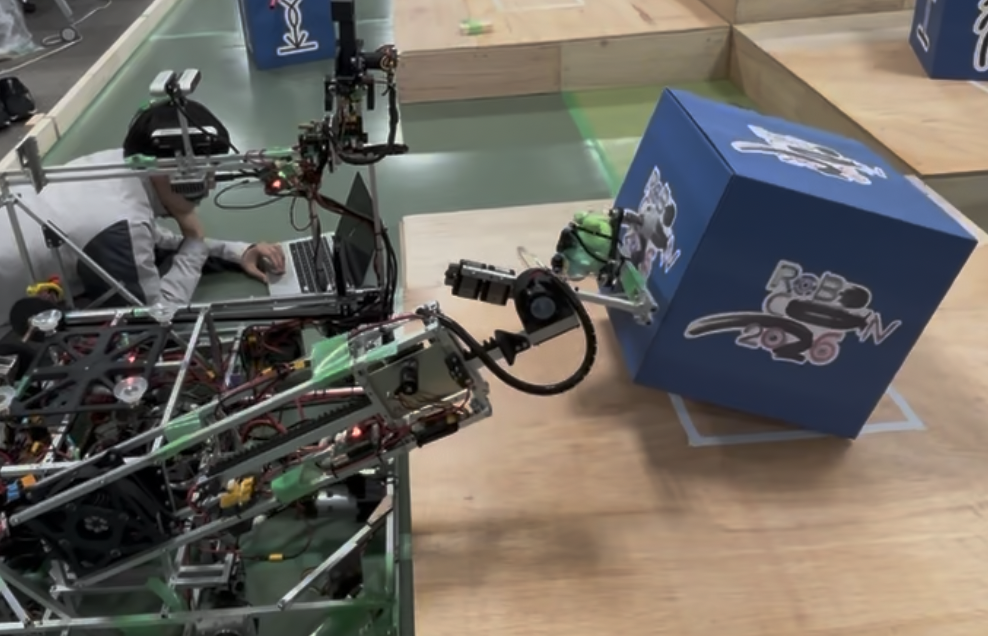
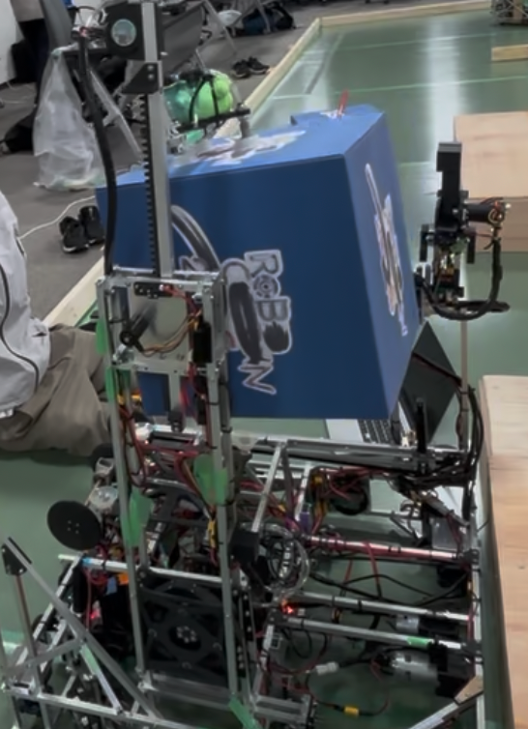
また、図のようにKFSを二段目の秘伝書棚に配置します。
設計思想としては、
- 一つの機構でKFSの回収、(機体内への)スタック、排出、配置を行う
- 自動制御のため自由度を持たせる
- 改修をしやすくする
の3点です。当初はKFS回収機構や配置機構を別々にする案が出ていましたが、R2は軽量化する必要があり、最終的に一つの機構で全てのタスクをこなす方針になりました。また、アームについてもいくつかの案を考えており、アームが中央に取り付けられており、KFSを振り回す案や平行リンクを用いてR2の動きを機構的にある程度制限する案などが出ていました。
設計思想二つ目の「自由度を持たせる」については、一つ目の思想を叶えるために必要となってしまった、というのが正しいです。制御班にはアームの逆運動学の制御をしてもらうなど頑張ってもらいました。
三つ目の「改修しやすくする」は、一つ目の思想が決まってからの設計で一番工夫したところです。機構に対するタスク量が多く、かつ初めて作る機構も含まれていたので、後から修復、修正する箇所が多いと予想し、コンポーネントごとにネジを数本外すだけで取り外しが可能なように設計しています。
反省点としては、アームの安定な位置を積極的に作らなかったことです。つまり、バネなどで自重補償をしなかったために、動作中に電源を切ると、重力によりアームが機体に叩きつけられてしまいます。本機体は、ダンパもつけていなかったため、もろに衝撃が伝わる仕様になっていました。実際に、デバッグの最中、機体に相当な負荷が何度もかかっていました。今後は、機体に負荷をかけない機構を作っていきたいです。
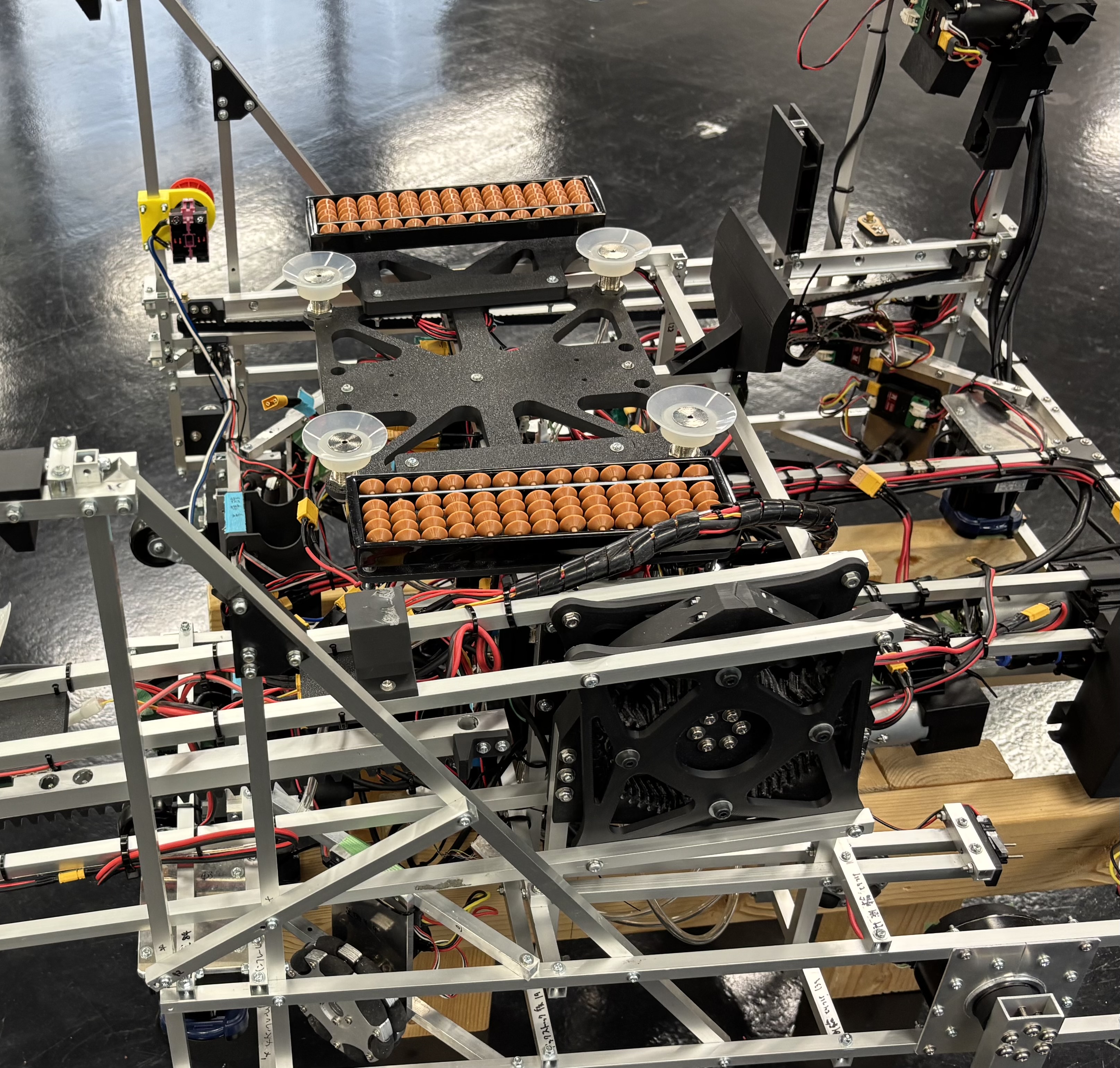
KFS保持機構
吸盤4つでKFSを固定し、移動中KFSが振り落とされないようにします。算盤がついているのは、KFSを吸引保持する前に位置決めをするためです。
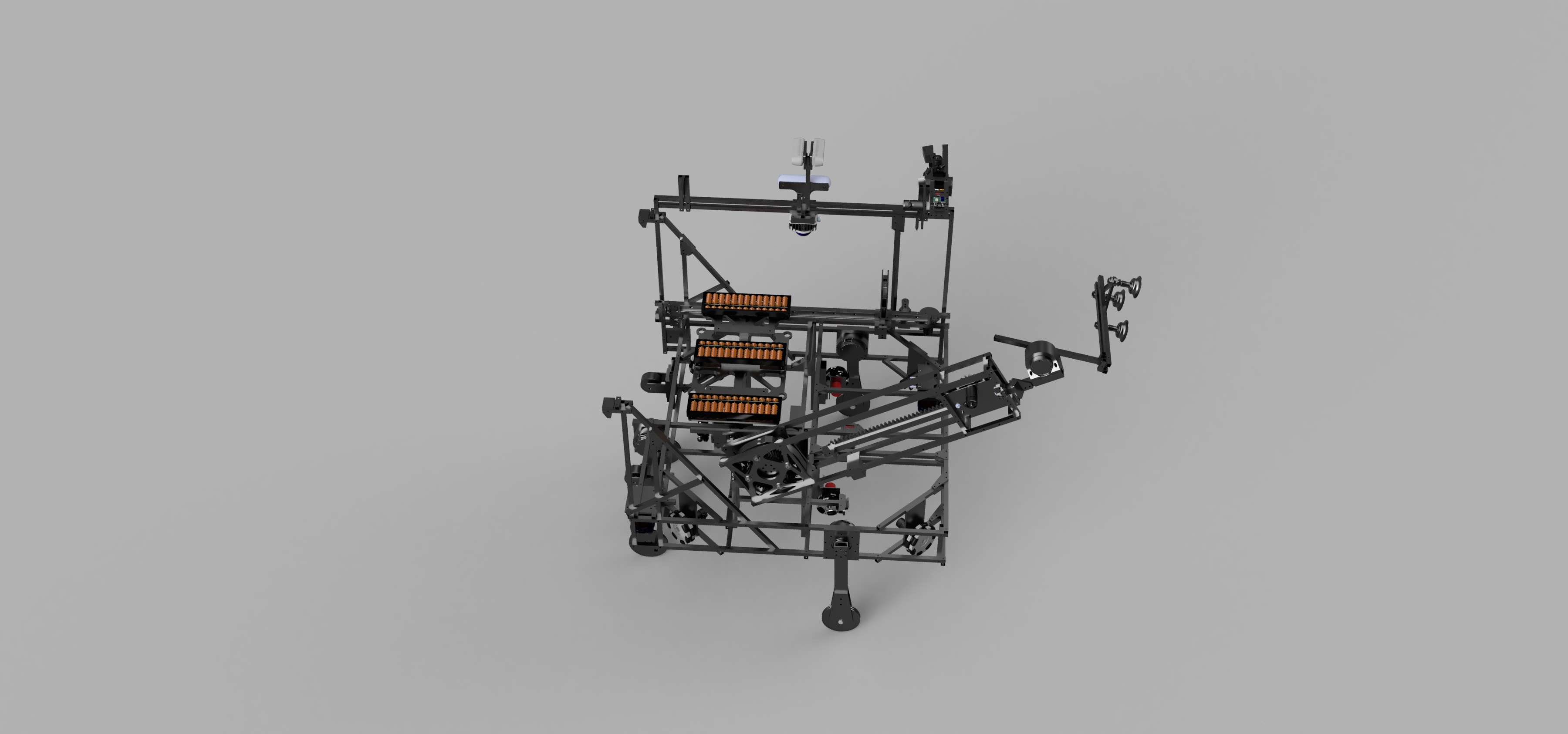
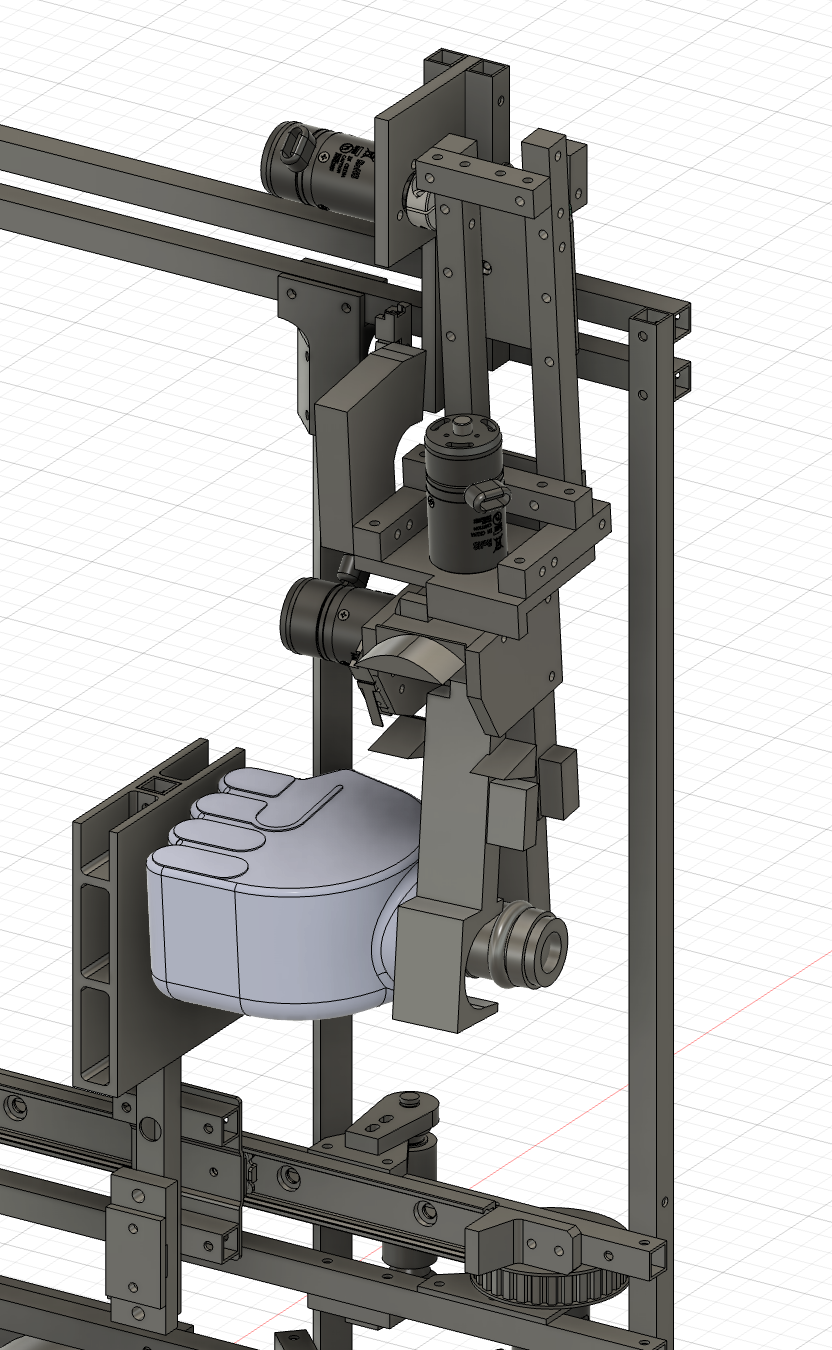
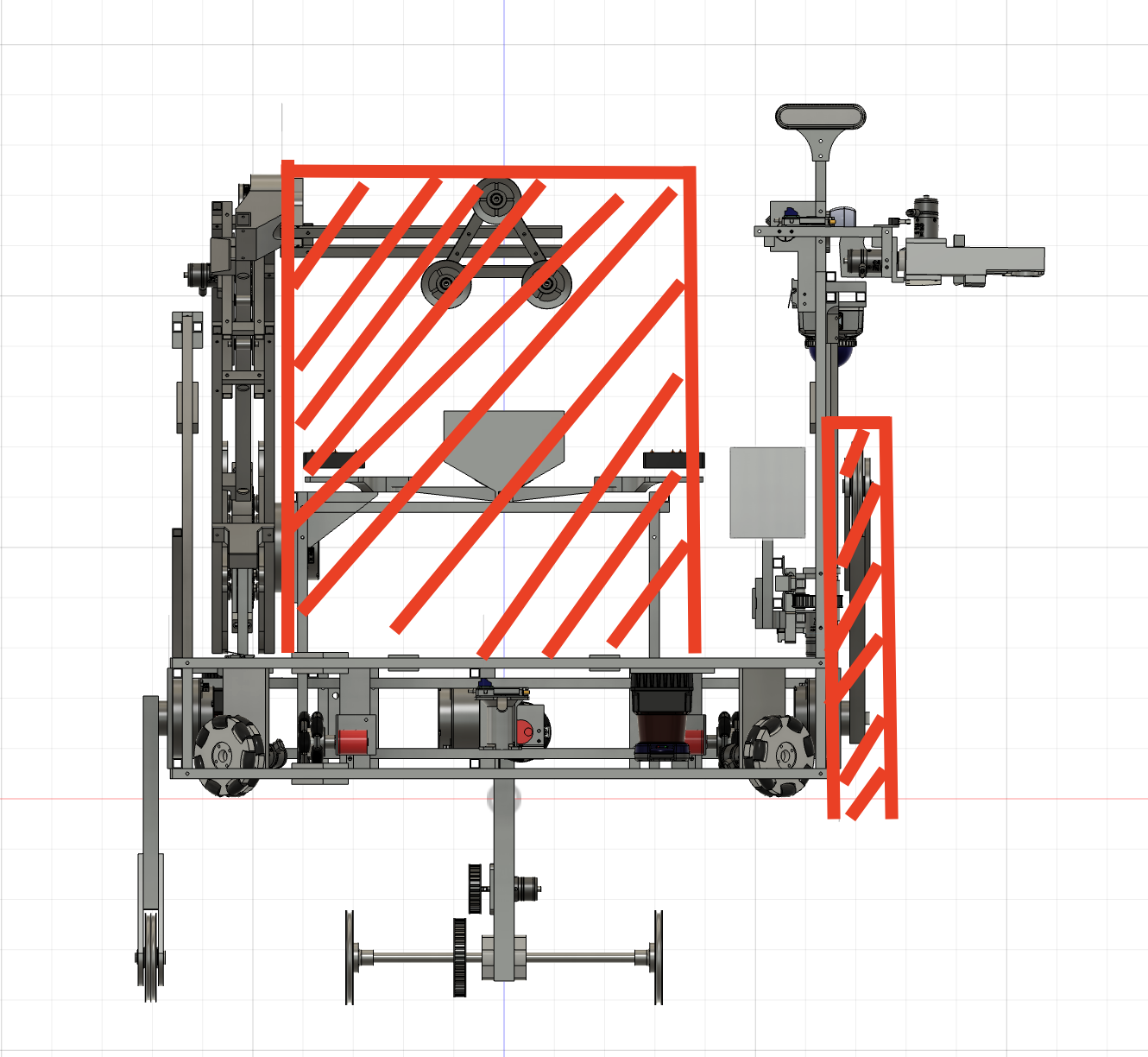
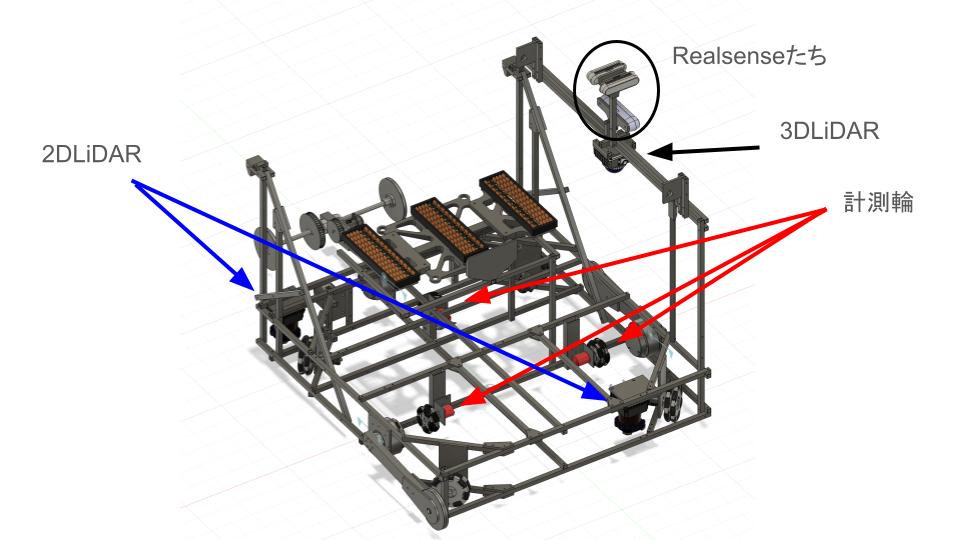
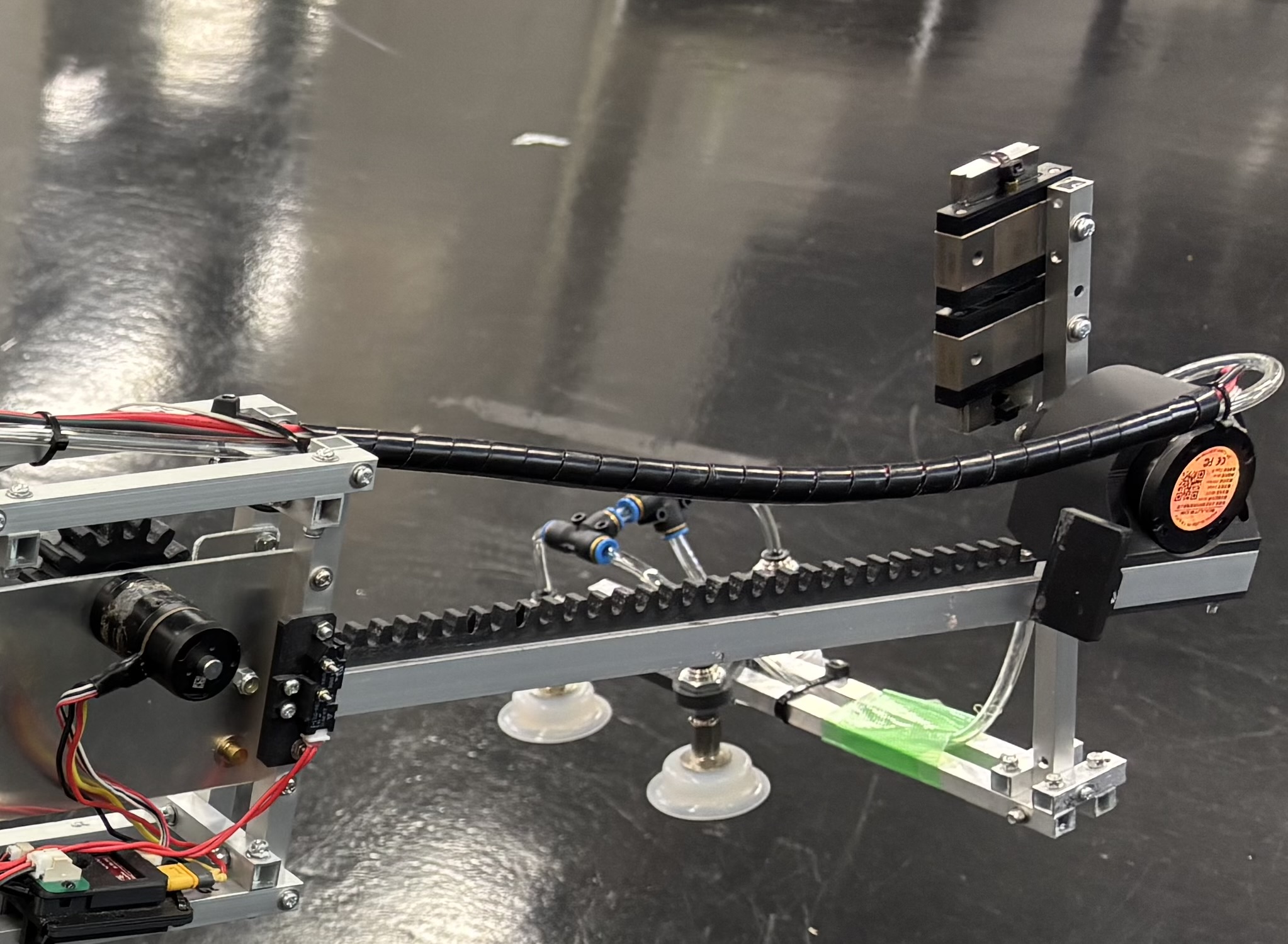
制御関係
自動機ということで、下の画像に示すようにたくさんのセンサ類がついています。この他にも、段差越えのための単方向LiDARや、IMUなどが載っています。
おまけ
特に力を入れて設計した、KFS回収/スタック/配置アームをコンポーネントごとに解説していきます。
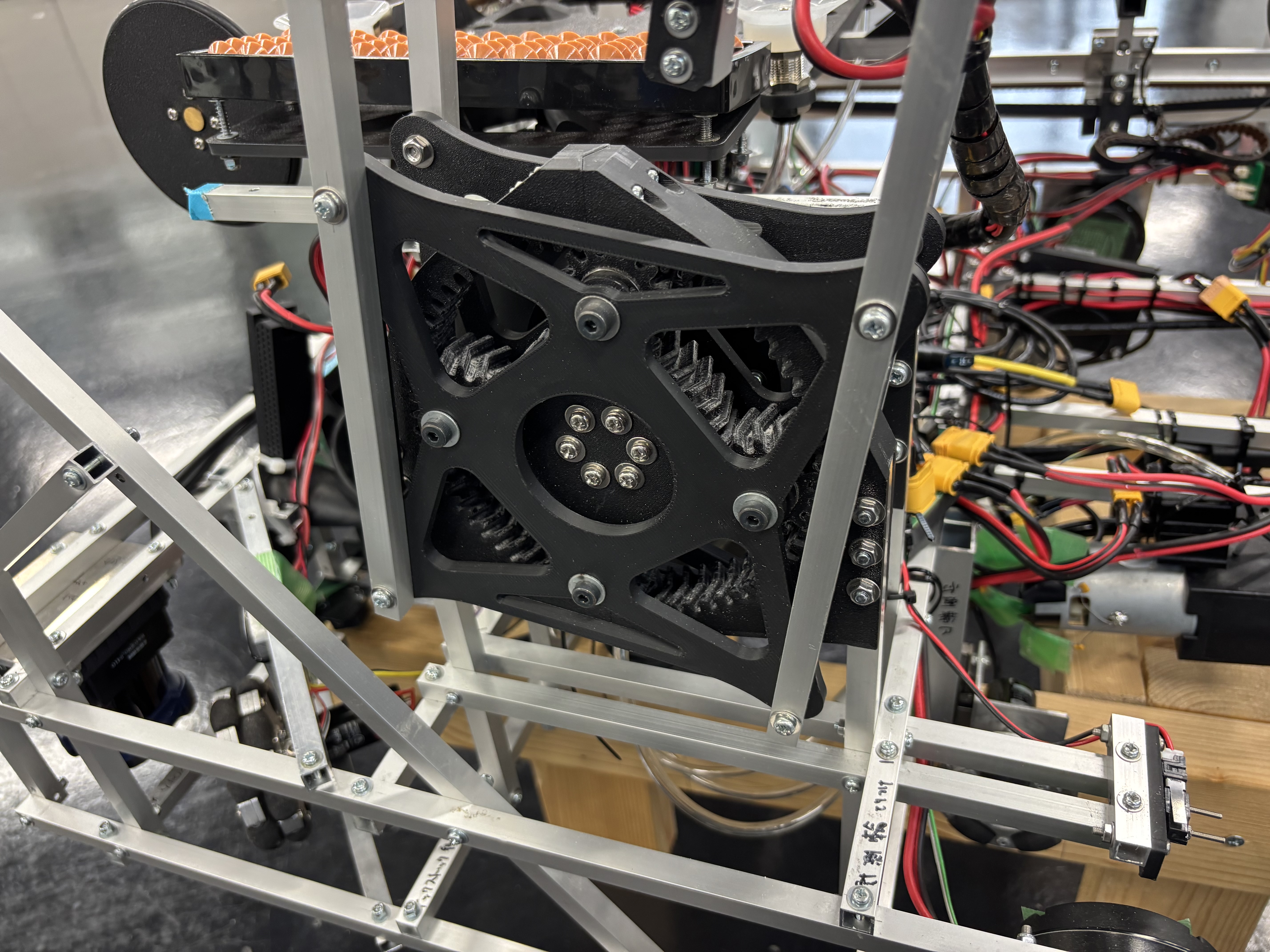
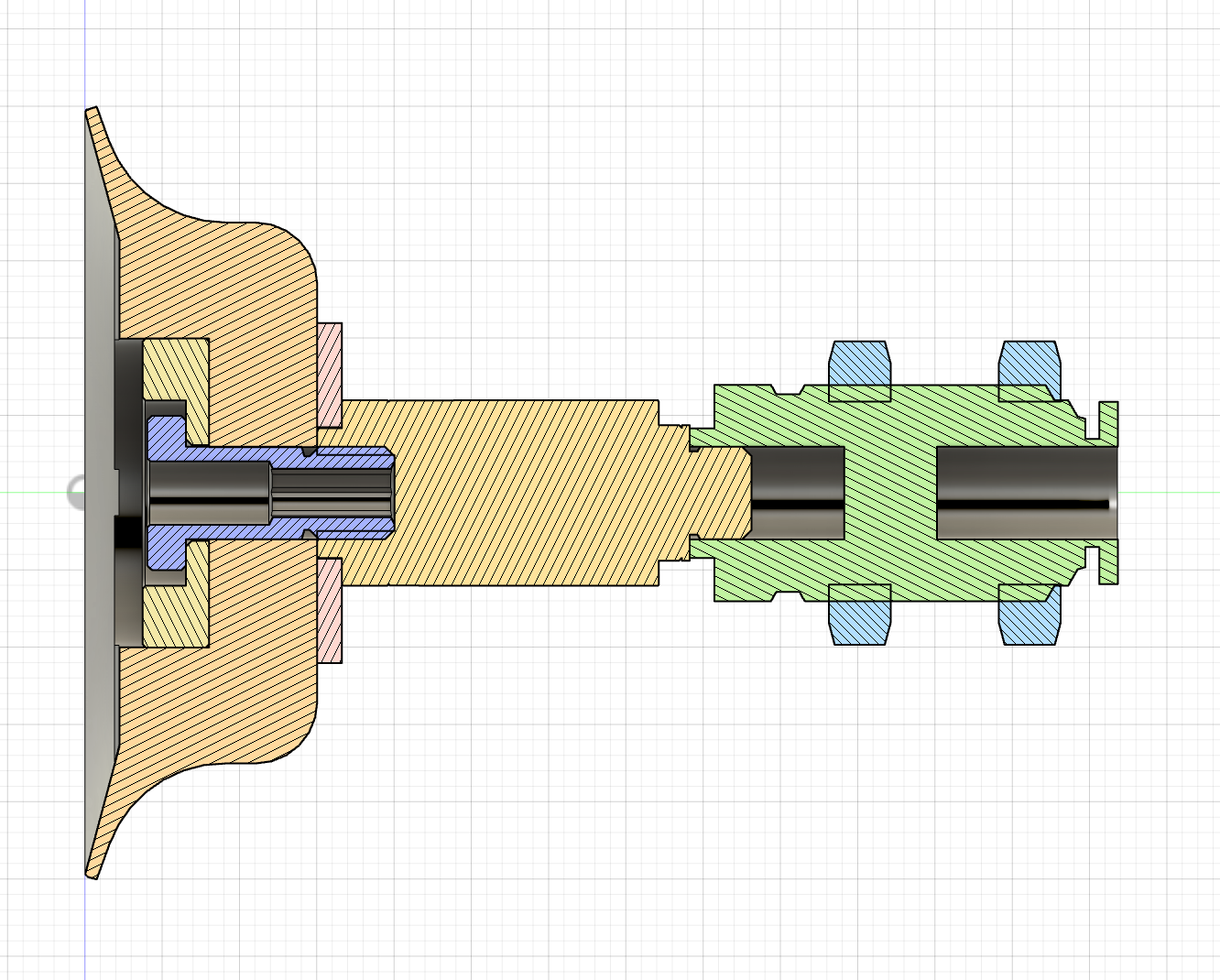
根本
段差越え機構と同じ、ROBSTRIDE02を採用しています。02を遊星歯車で20/7 : 1に減速しています。
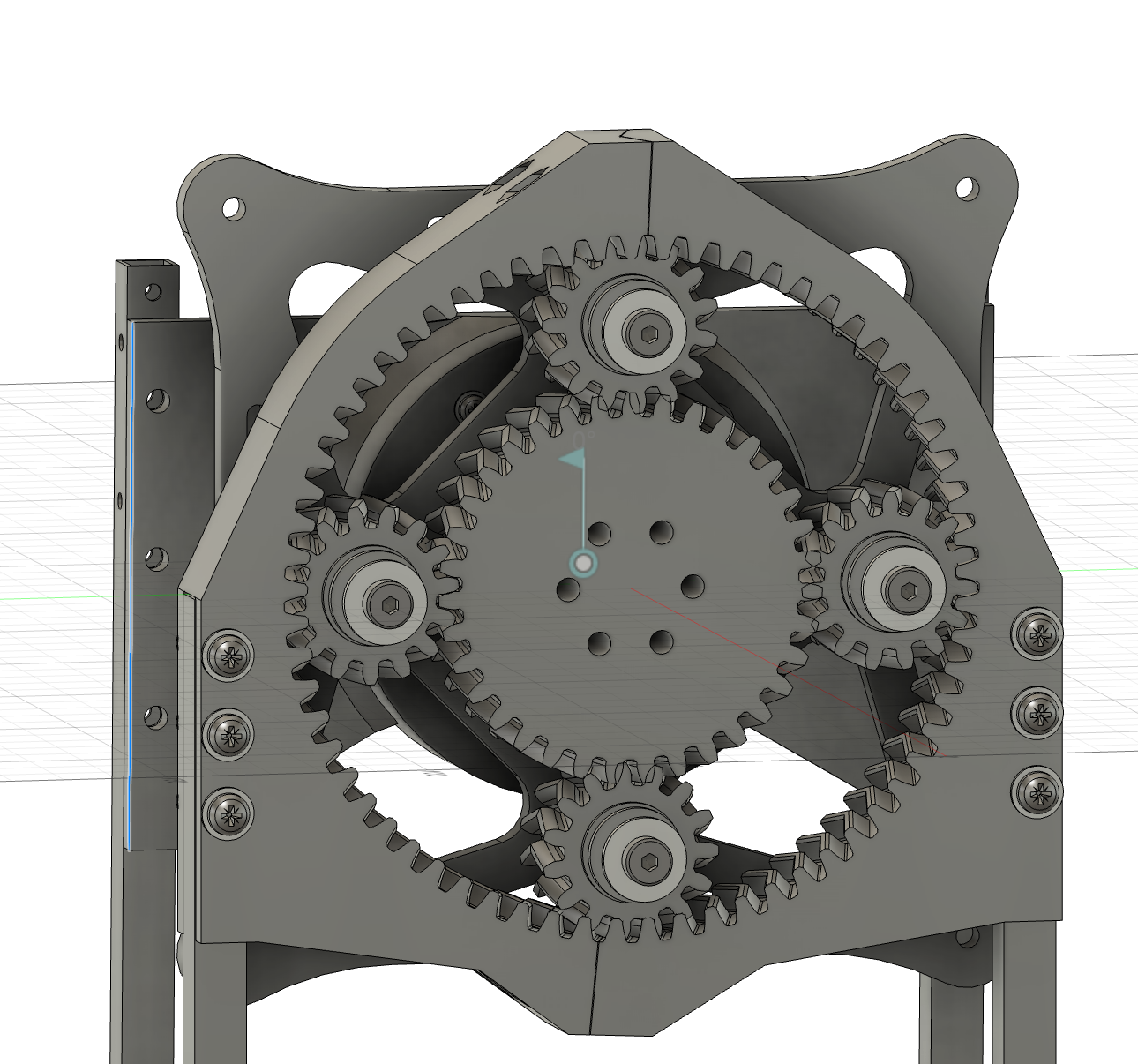
減速機を噛ませるという、ROBSTRIDEのいいところを捨てた設計にしたのは、必要なトルクを発生させるという大義と、プリントパーツで遊星歯車を作ってみたいというロマンがあったからです。
(実は、アームのver1では、ROBSTRIDEとアームを直結していました。しかし、アーム重量がとても重く、かつモーメントが大きい設計だったため、全然トルクが足りませんでした。そのため、減速機を噛ませるという発想になっています。)
(※ROBSTRIDEには絶対値を取れるエンコーダがついているため、ROBSTRIDEとアームを直結すれば、ROBSTRIDEの値を入力するとアームの角度が一意に定りますが、減速すると(今回の場合は約3倍)、ROBSTRIDEの値を入力したとしてもアームの角度が3状態あり、一意に定りません。つまり、減速すると、アームの原点出しのためのリミットスイッチを新たに設置しなければいけなくなり、めんどくさいね、ということです。)
全てのギアたちは、やまば歯車で構成されています。これにより、アームの回転方向と垂直な方向の拘束をしています。
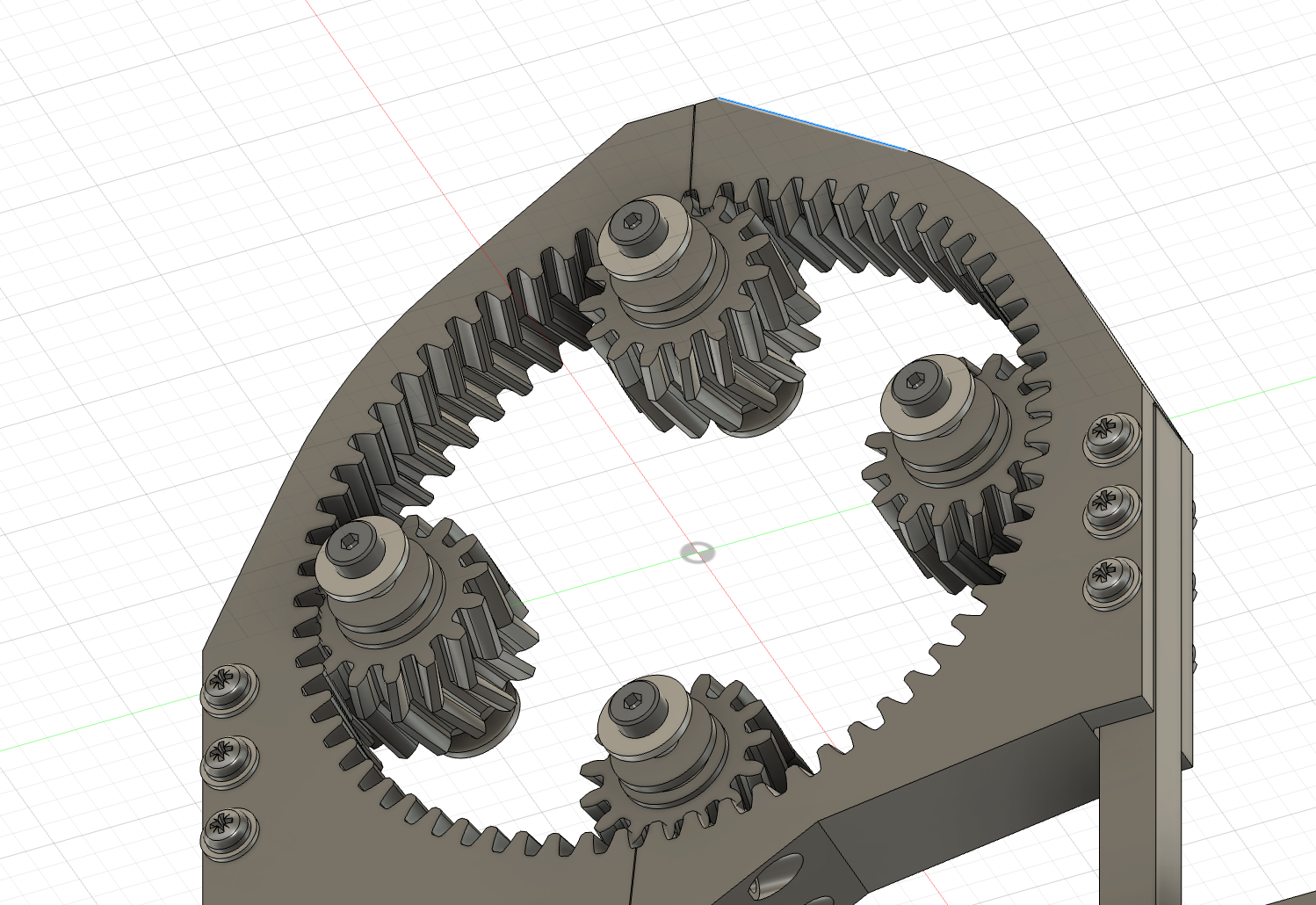
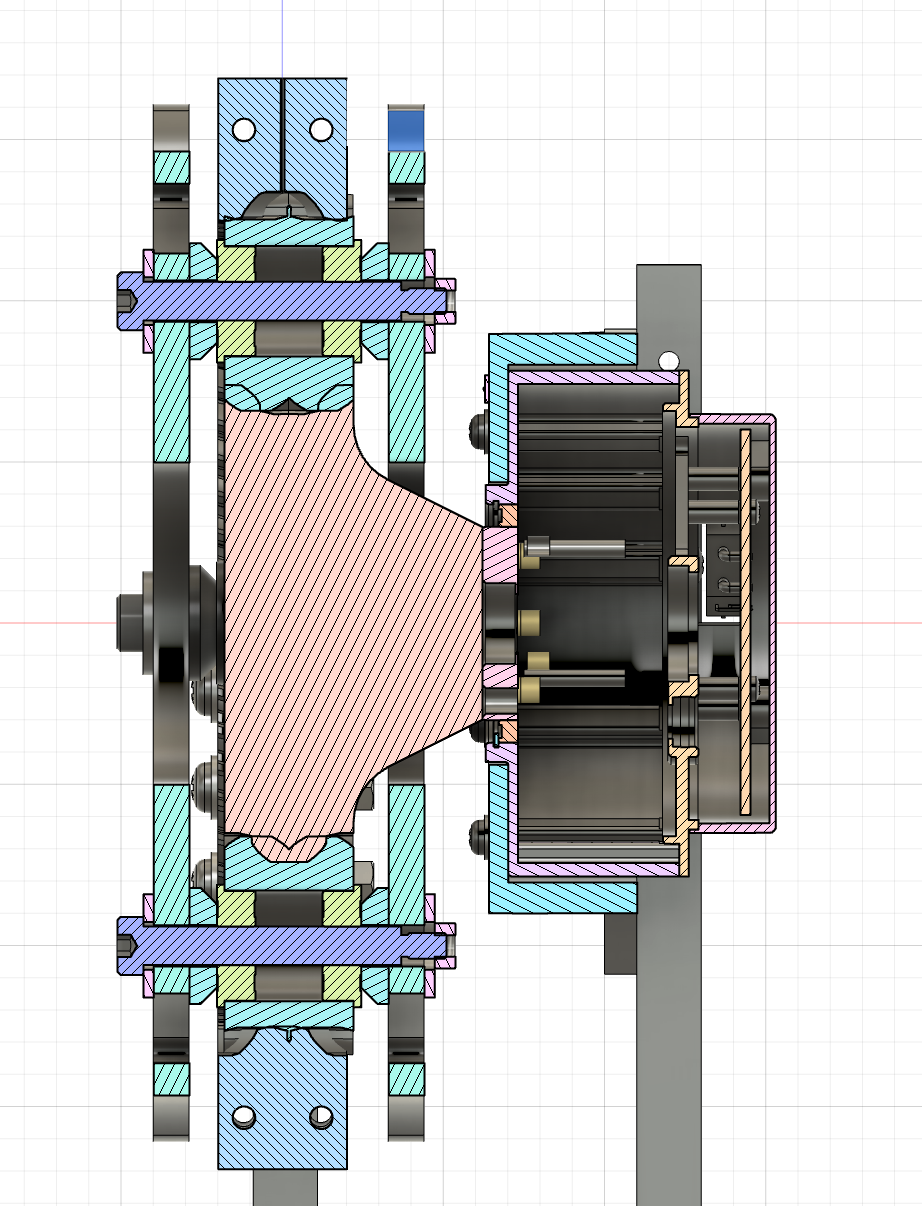
遊星歯車の出力ギアはプラネタリーギアであり、これら4つのギアにアームのフレームが取り付けてあります。断面図に示すように、プラネタリーギアは中空になっており、両端をフランジ付きベアリングとスペーサー、フレームとの接続パーツで挟んで、ストリッパボルトで固定しています。
リングギアは、二つのパーツから構成されます。やまば歯車の溝に合わせてボディを分割しています。(言葉で書くと、いかにも弱そうで今にも破断しそうですが、実際はなんやかんや耐えていました。プリントパーツの弾性力が変形を吸収していた、プラネタリーギアが4つあるので力が分散されていたので耐えていたのではないか、と考察しています。)
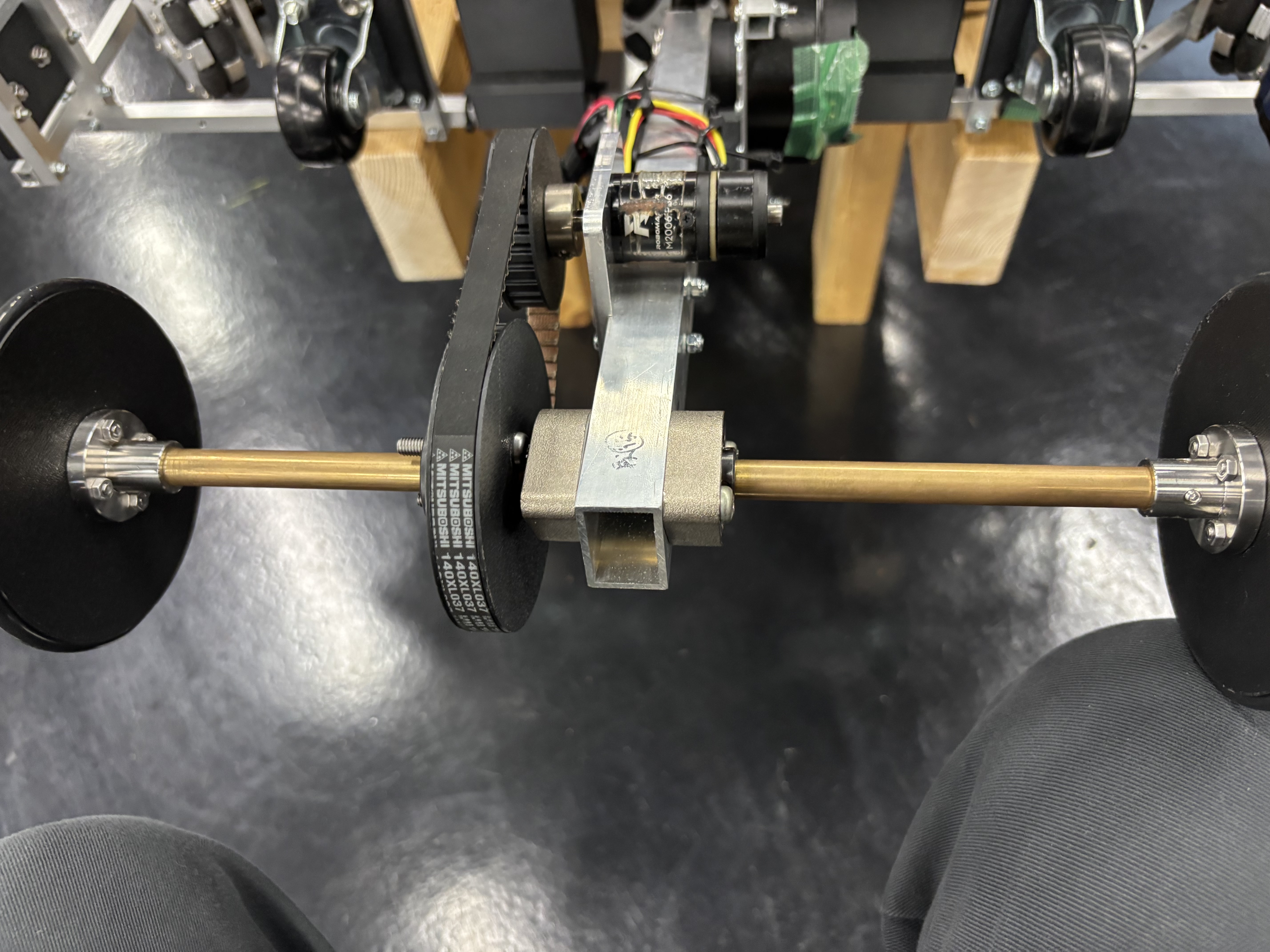
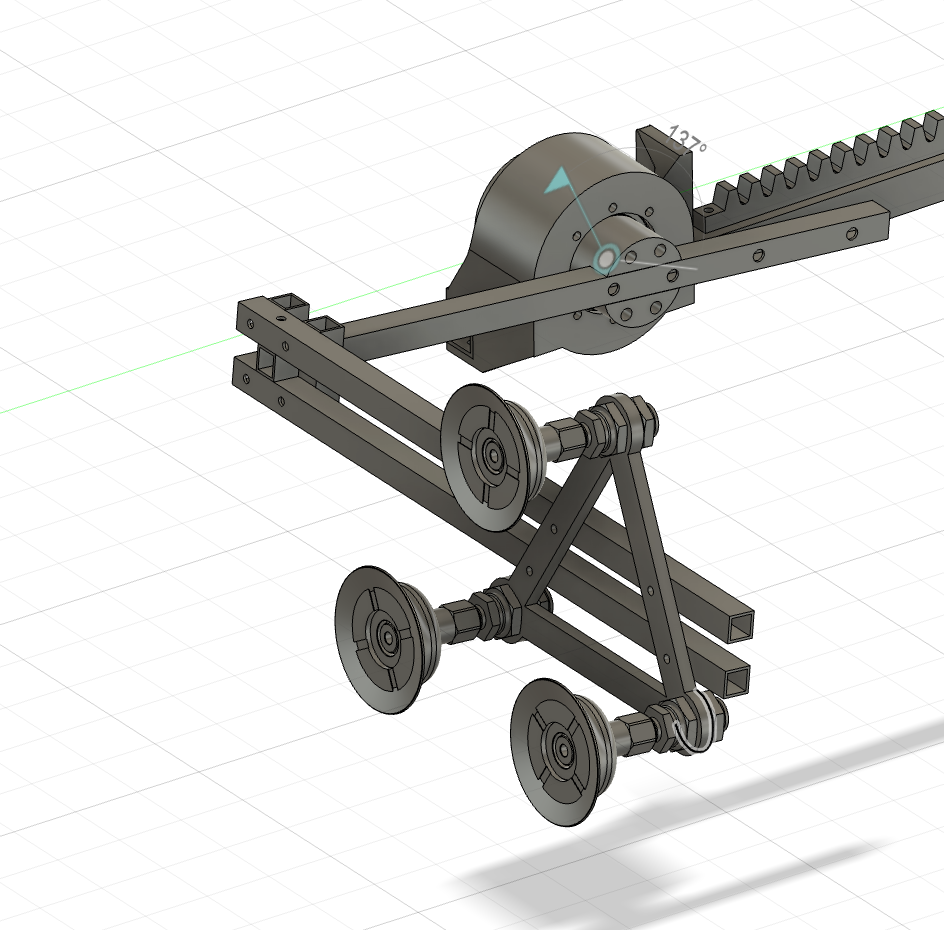
直動機構
二つ目の軸です。ロボマスモーターM2006とラックアンドピニオン機構を採用しています。一般的には、ラックアンドピニオン機構を実現させるために、リニアガイドやミニチュアガイド、リニアレールを使うことが多いですが、今回は、軽量化のために、シャフトとベアリングのみによってラック側を拘束しています。(学ロボ2024RobotechのR2のアームを参考にしました)
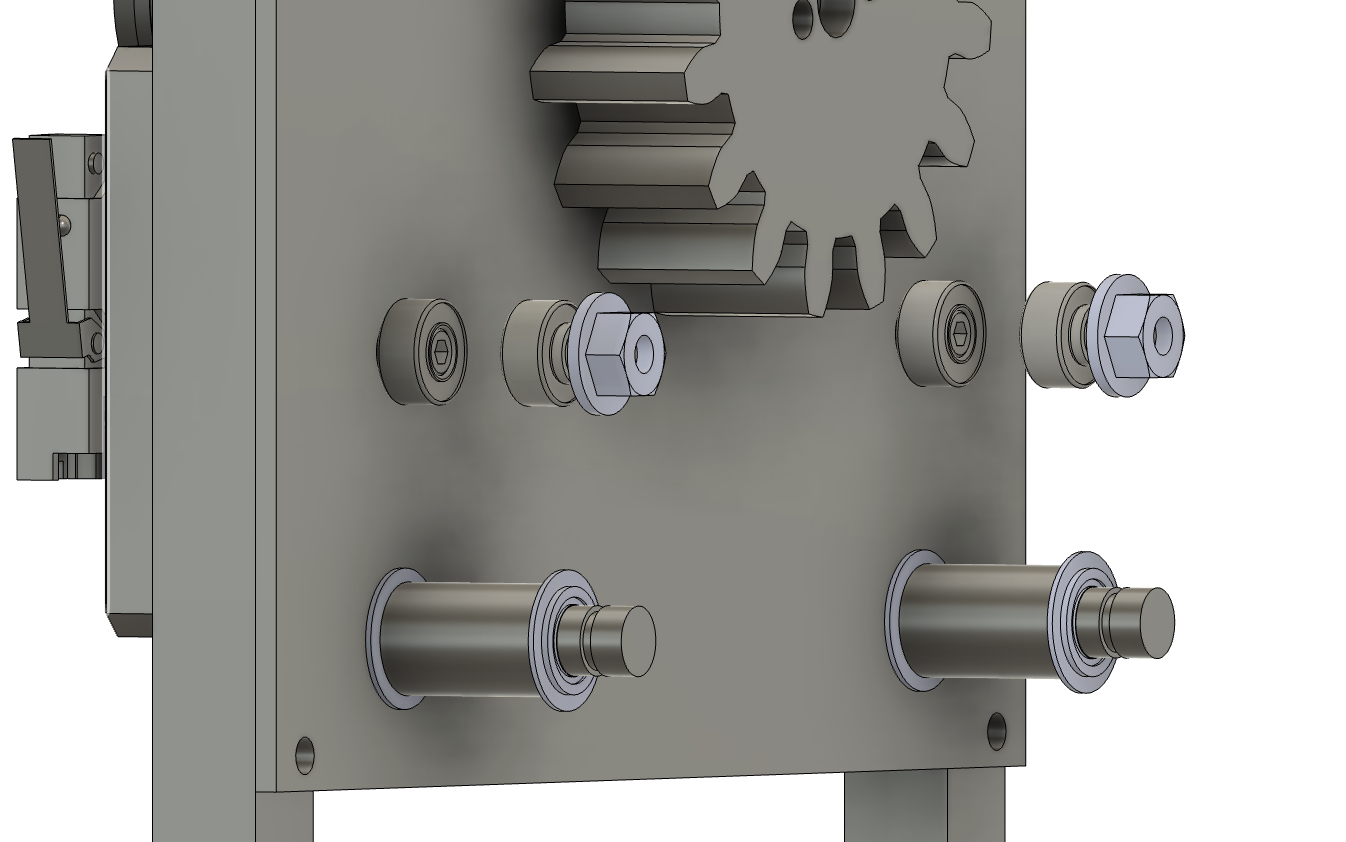
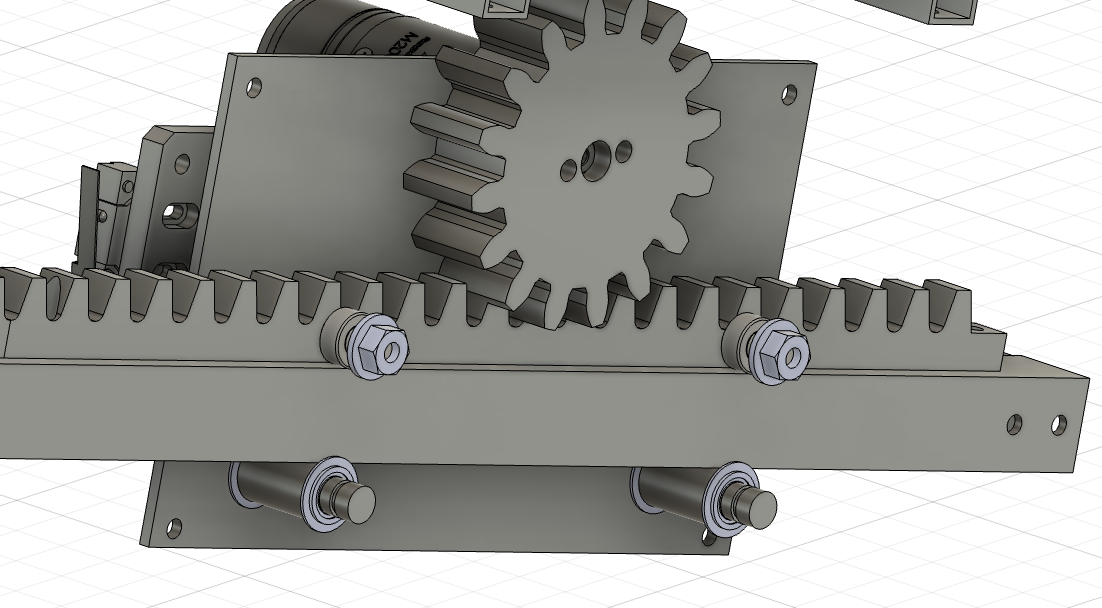
上部4箇所のネジ付きベアリングと、下部2箇所のローラーの総計6箇所でラックが取り付けてあるアルミフレームの位置を拘束しています。実際には、これらの拘束だけでは剛性が足りていなかったので、先輩のアドバイスにより、アルミ板にカグスベールを貼って隙間を埋めています。
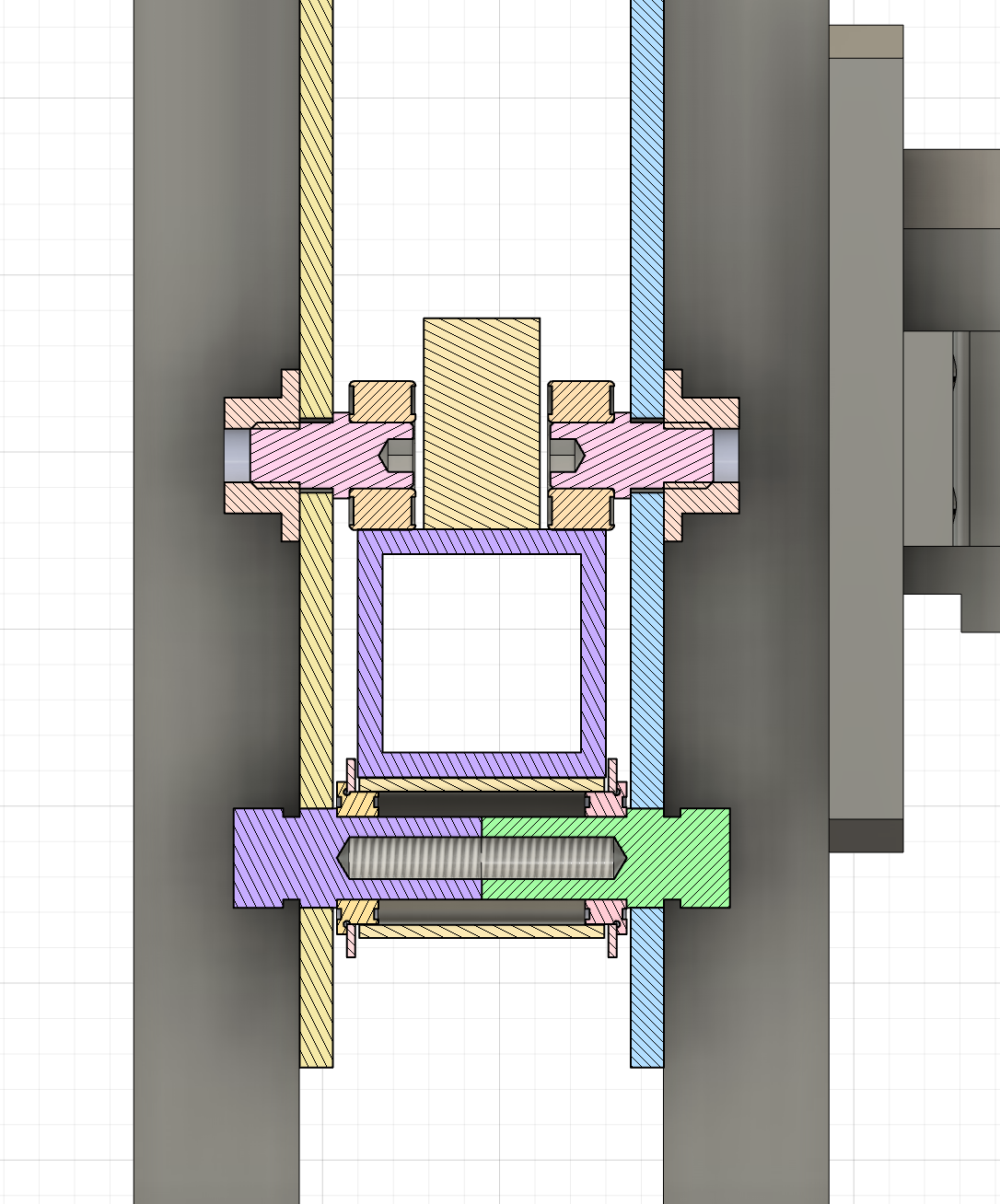
下部のローラー部品について、詳しく見ていきます。まず、図の黄緑色と紫色で示されたシャフト部分です。
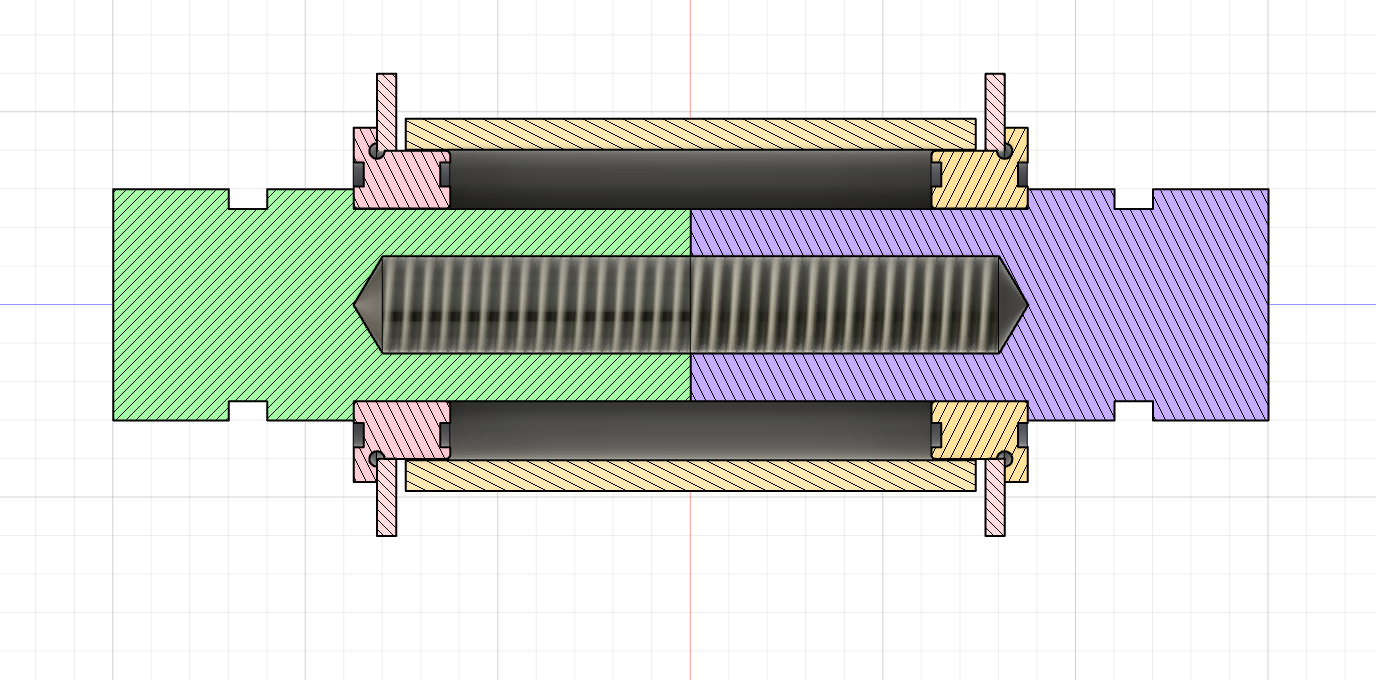
これらは、φ6mmの真鍮棒を切り出し、一部φ5mmの表面切削、ねじ切り加工、溝切り加工を施しています。これらをM3のネジ頭を切断したスタットボルト(笑)で結合します。
すると、シャフトの中央部分に一続きのφ5mm部分ができるので、そこに、フランジ付きベアリング、極薄樹脂ワッシャ、スペーサーを対照に配置します。
最後に、このようにして組み上がったパーツを固定されているアルミ板に挟み、外側からE型止め輪をはめることで、ローラー部分が出来上がります。
このような複雑な構造になってしまったのは、直動の滑らかさと拘束を両立させるためと、金属パーツ同士をできるだけ接触させないようにするためです。特に金属パーツ同士の接触は、最悪、削れた金属粉を撒き散らすことになるので、最新の注意を払いました。
先端部分
三つ目の軸です。関節軸となっており、アクチュエータには、ROBSTRIDE EDULITEを採用しています。
先端部分.
定格荷重は1.6N・mなので、軸先重心を0.5kg、距離を0.3mと仮定しても必要なトルクは1.47N・mとギリギリです。ですので、部室に転がっていたリニアガイドくんにおもりになってもらい、彼をもってカウンターウェイトとしています。(実はROBSTRIDE00(定格荷重5N・m)に換装予定でした。。)
最後に、吸盤関連部品です。吸盤を正三角形の位置に配置しており、KFSの面を吸着して保持します。
断面図に示すように、吸盤とホルダの間に落下防止弁(黄色)を噛ませてあります。これにより、3つの吸盤のうちどれか一つでも吸着していれば、KFSを吸い寄せられるようになっています。
最後に
2026年6月13日現在、各大学のロボットを見て、その完成度の高さに圧倒されました。もっと洗練されたロボットを作って、来年こそは本戦に出場できるように頑張ります。
今後ともT-semiへの応援をよろしくお願いします。
私は中国大連工業大学の試合の選手ですが、ロボット2のデザインと話してもいいですか? 私たちにはたくさんの考え方が似ていると感じます
コメントありがとうございます!
R2(ロボット2)についてどんなことを聞きたいですか?