学生ロボコン2026に出場するために作成したT-semiのR1の機体紹介をしていきます。
残念ながら本戦に出場することはかないませんでしたが、私たちの作った機体のいろんな部分を見せられるよう紹介していきます。
今回のNHK学生ロボコンの概要
NHK2026のテーマはカンフーです。
テーマの意味は結局最後までよくわからなかったのですが、とにかくR1がするべきタスクは大きく分けて5つあります。
1. 槍の柄を回収してR2と協力して武器を完成させる。
2. 梅花林(段差のあるエリア)にあるR1用秘伝書を回収する。
3. 秘伝書棚の下段に回収した秘伝書を設置する。
4. R2を持ち上げて秘伝書棚の上段に秘伝書を配置する。
5. 相手が棚に配置した秘伝書を地面に落とす。
タスク多すぎ。意味が分かりません。誰がこれができると思ったんだ? これでもR2よりはましだという( ^ω^)・・・。
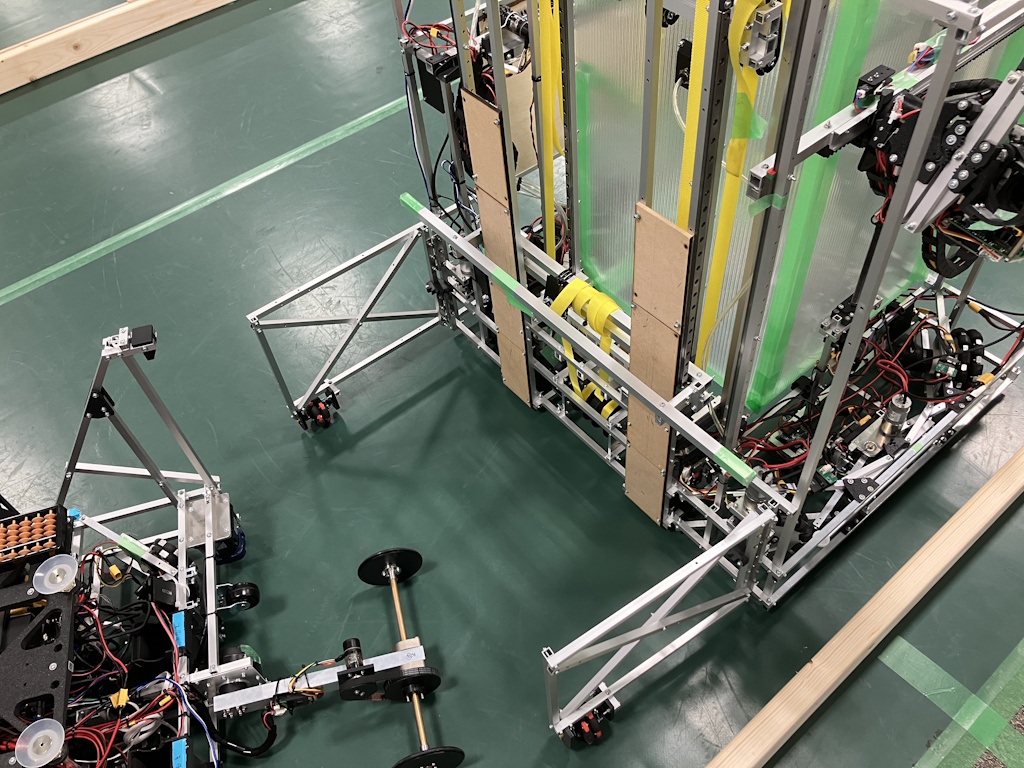
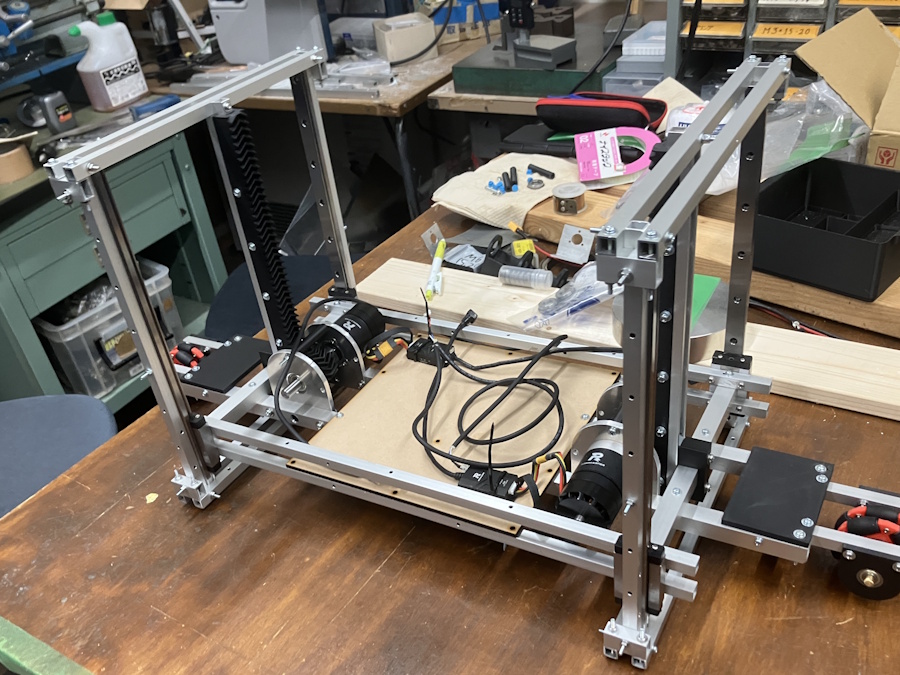
機体紹介
こちらがR1になります。
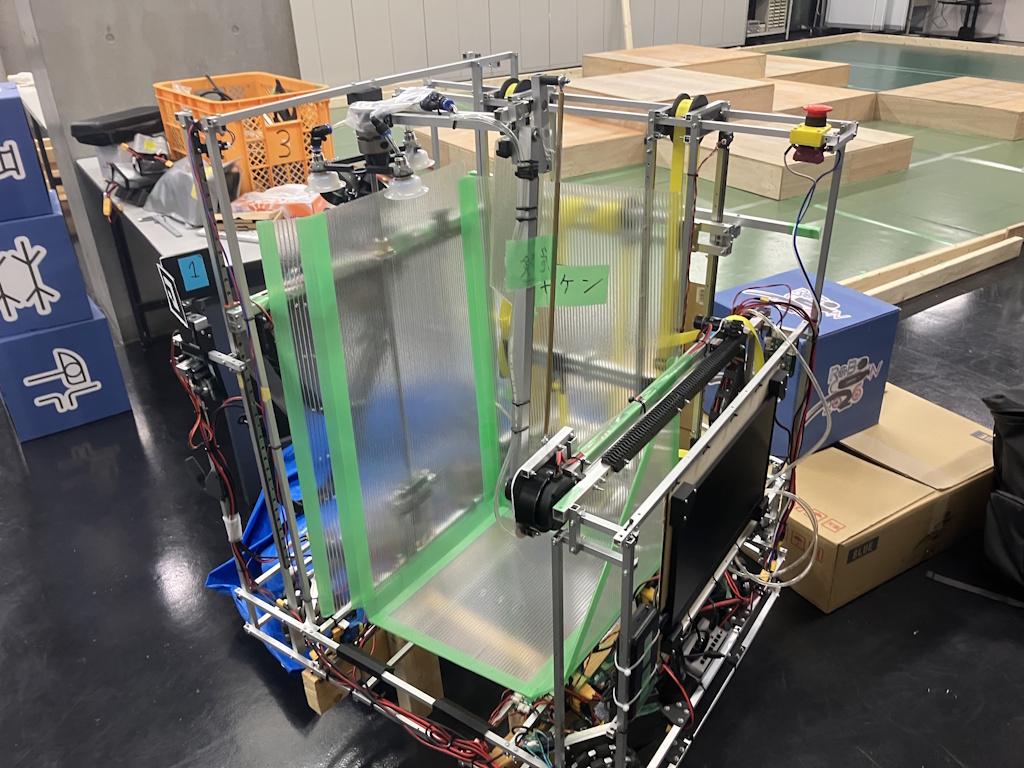
R1は手動機です。自動機であるR2と同じフィールド上で共同作業をする必要があるので確実に動く機構をできる限り採用することと、直前の作戦変更にも対応できるように必要とされるすべてのタスクに対応できるように機構を搭載することの二点を念頭に設計をしていきました。
タスク別に各機構を紹介していきます。
足回り
ロボマスのM3508に127mmのオムニホイールというロボコンではよく見る一般的な構成になります。ABUルールでは坂を上る必要があったので、段差に強い大きな径のオムニを選択したのですが、NHKでは必要がないことが発覚し、ただ重いだけの足回りになってしまいました。その代わりタイヤが大きい分トップスピードはそこそこ速かったので一長一短といったところです。
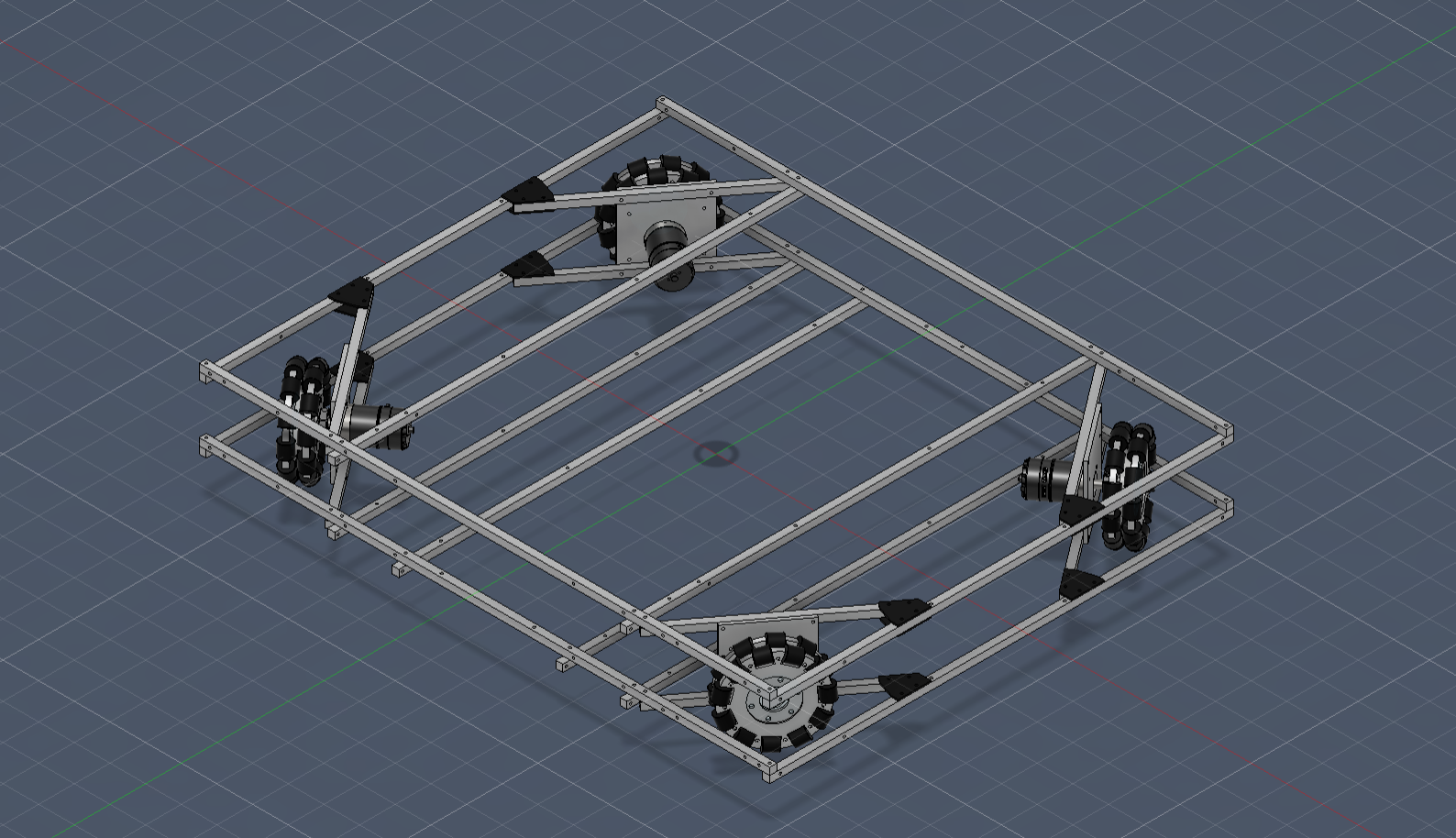
もともとはM3508ではなく、去年の学ロボで使用したブラシレスモーターを回路班力作の自作モタドラの新バージョンで動かす予定だったのですが、回路作成者の多忙によりファームウェアが思った動きになるまで書ききれず3月末にM3508に取り換えられました。この構成だったら、インホイールオムニにして足回りを小スペースにしたりオムニを両持ちにしてモーターへの負荷を軽減したりしたかった。少々反省の残る足回りになってしまいました。来年こそは自作の回路のブラシレスで爆速の足回りが見たいですね。
スタッフ(槍の柄)回収機構(ハンド+直動)
後輩が作成した機構になります。上下と左右の二つの直動とハンドの根元の回転により、低い位置での武器合体と棚のすべてのKFSの押し出しを可能としています。
武器合体には槍先とスタッフを押し付けるためのそこそこのパワーが必要であったため、武器を高い位置で合体させるとロボットが倒れる可能性がありました。それを防ぐために、ハンドが低い位置で武器合体を行い、それが終わったら棚にある秘伝書を狙えるようにハンドを高い位置まで移動します。
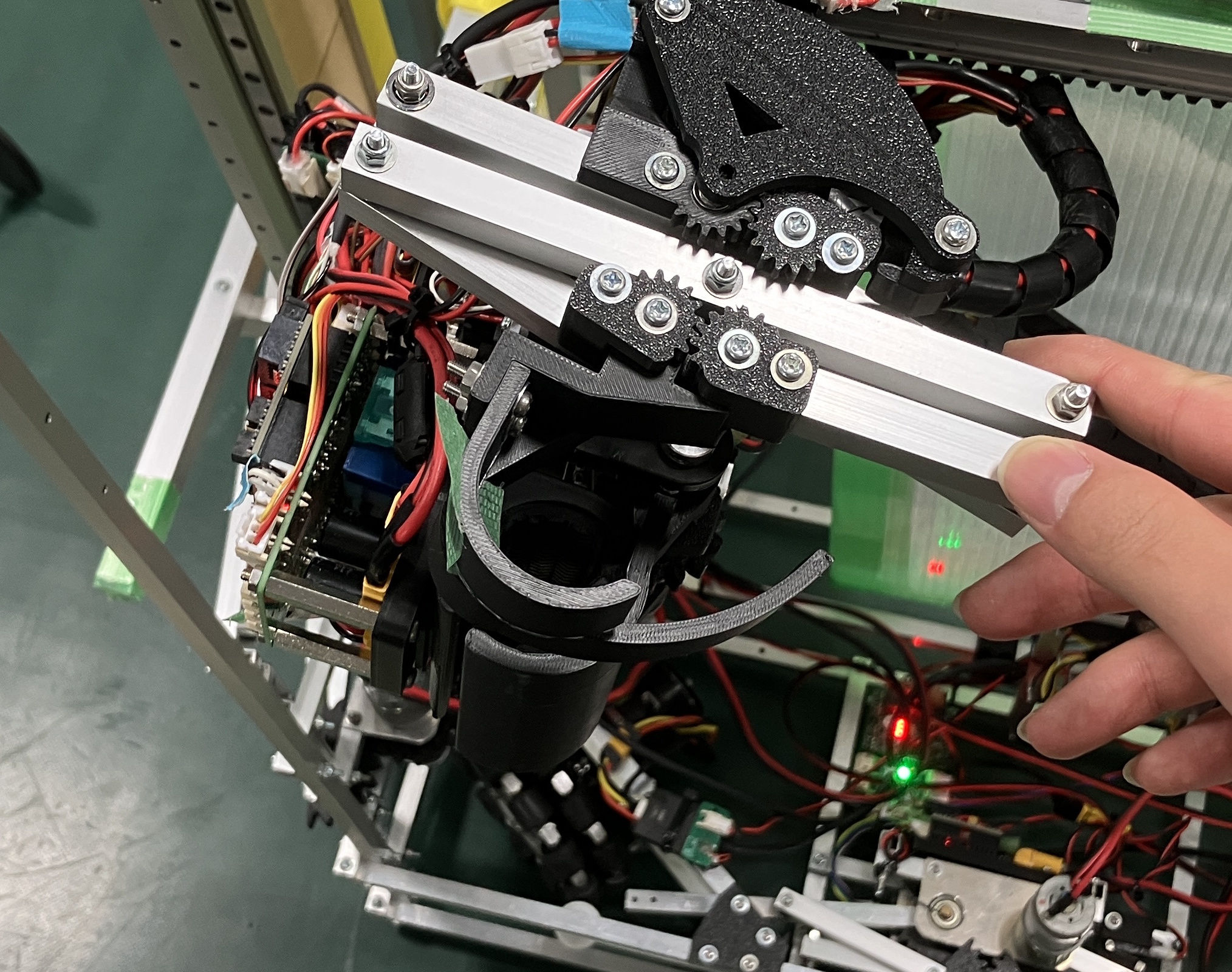
ハンドは単体だとスタッフをつかむことができないので、引き寄せのためのリンクを作成しました。ただひっかけるだけの形状だと引き寄せる動作時にハンドからスタッフをこぼしてしまう可能性があったので、リンクの一部からもハンドの指をはやしたところ安定してつかめるようになりました。
スタッフの保持はロボマスのパワーで挟みます。ロボマスへの負荷的にあまりよくないので、次は別の方式に変えたいですね。
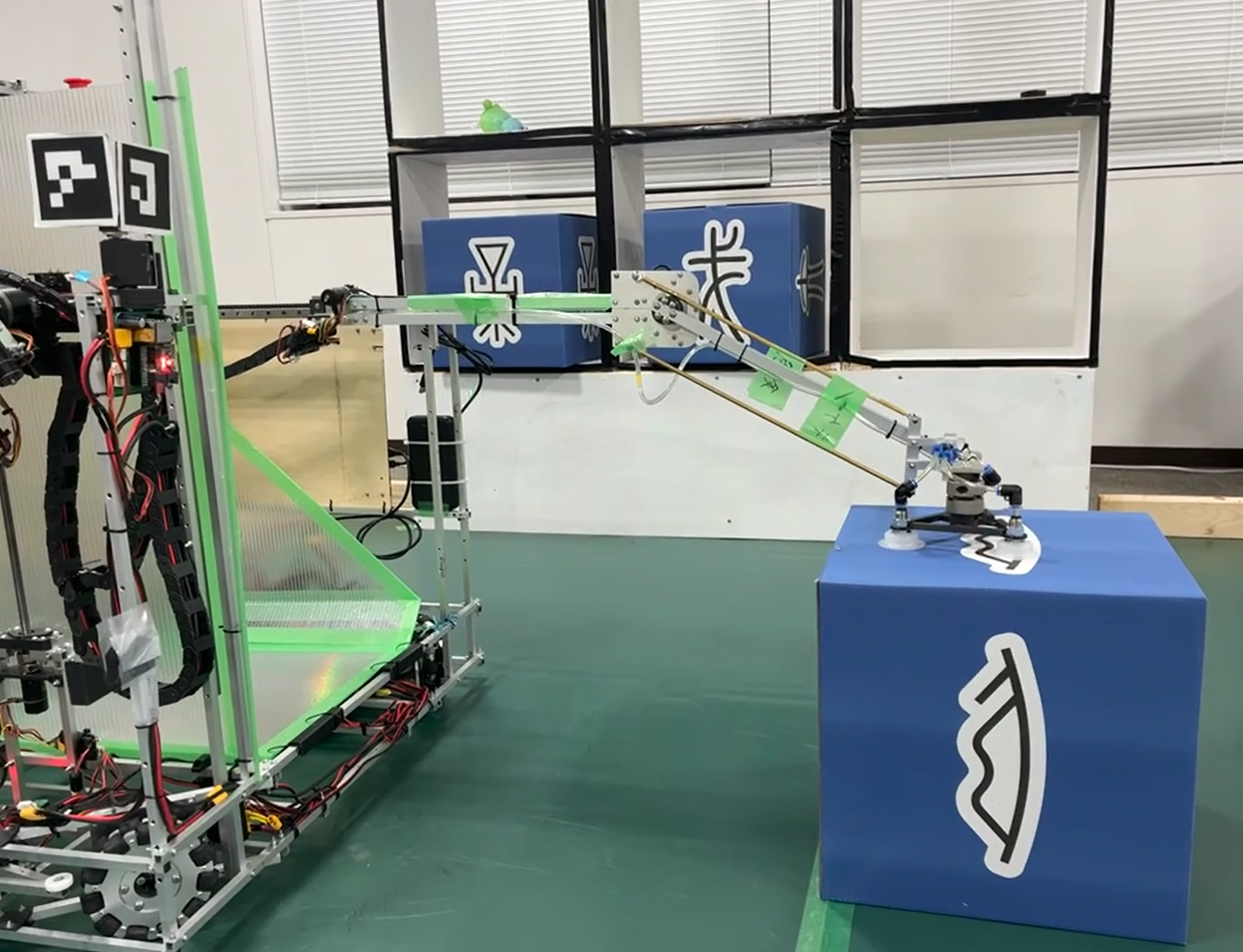
秘伝書回収アーム
設計意図としては、制御が簡単になるようにアームのアクチュエータの数を少なくし、かつ配線の簡略化のためにアームの先端付近へのアクチュエータを配置できる限り避けるようにしました。検討の結果、平行リンクのアーム+アーム根本の直動という構成を採用しました。この構成の場合、アームの根元の前後方向の移動だけでKFSを棚に押し込むことができるのがメリットとなります。
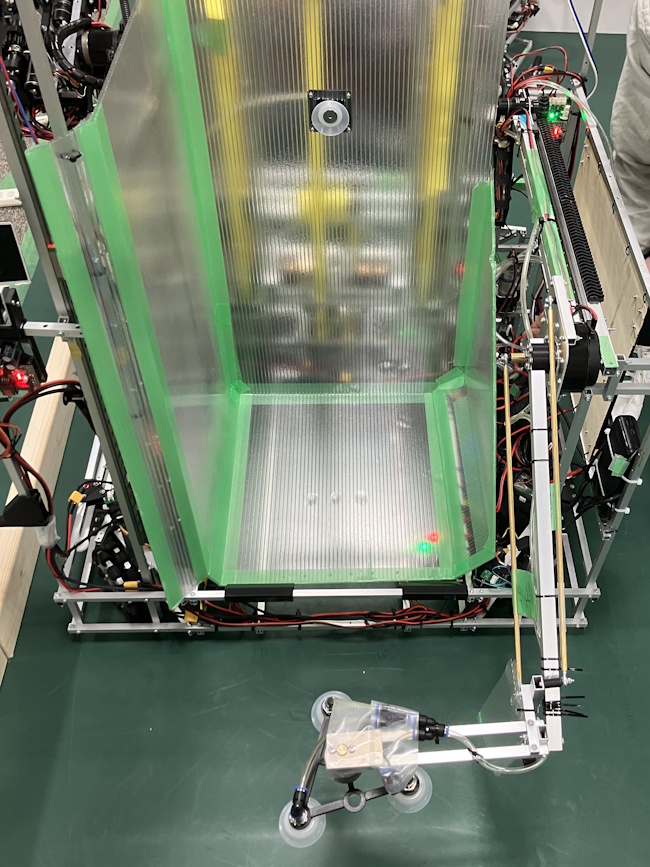
ハンドの先端は吸盤を3つ配置した形状となっています。この吸盤が物体と完全な平行を実現したうえで押し付けないときちんと吸引してくれない曲者で、平行リンクといえども、組み立て精度や剛性、ついてしまった歪みなどにより、地面や物体との吸盤がつかめる程度の平行を実現するのはできませんでした。そこで間にサスペンションを挟むことで、押し付けるときに平行になるようにし、しっかりつかめるようにしました。この形状にしてからは、正しい位置ならばほぼ100%つかめてたと思います。
また、どのような作戦にも対応できるように、R1用の秘伝書を3つすべてを同時にロボットに積むことができるようにこだわりました。機体中央部は秘伝書を入れられるように広めに確保し、ロボット内部で二つ重ねて移動することができます。動作するときにアームがどこにも干渉せずに秘伝書の回収、保持、配置を可能とするためにリンクと直動の長さにはだいぶ気を使って設計していました。一応、ABUルールの600mmの高さにある秘伝書もつかめます。
実際に試作してみたら、平行リンクの滑らかさが想像以上によく、同期の機構リーダーのお墨付きを無事もらえました。
壁あて機構
武器合体時にR1の位置を壁あてにより、向きと位置を調整するための機構になります。
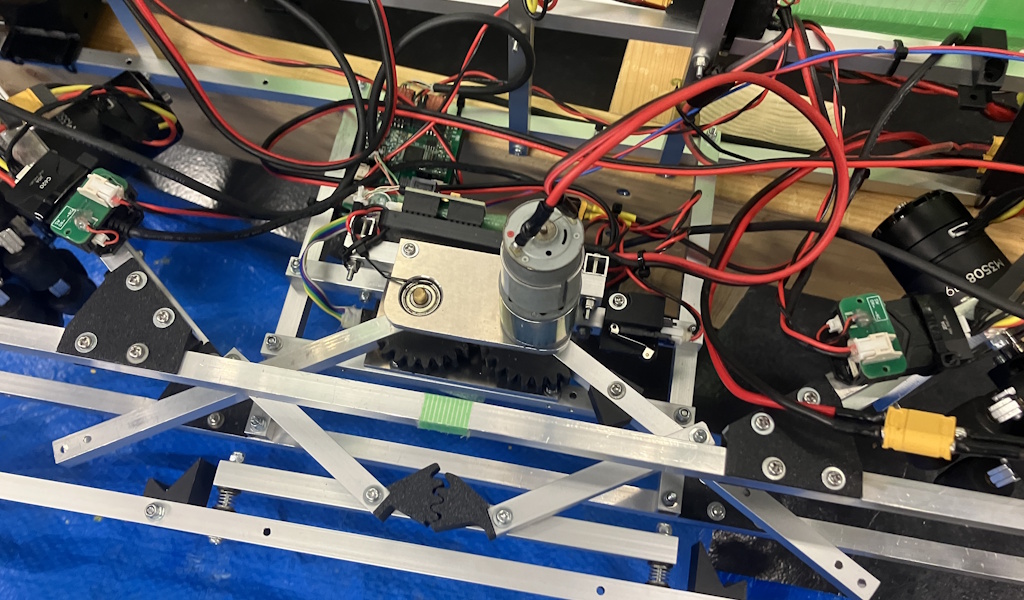
ギアとリンクの組み合わせにより、アルミ角パイプを平行に押し出します。アルミ角パイプにばねが取り付けられていて、壁にあてるとフレームの一部が引っかかり、それ以上動かないようになっています。これにより、壁あて時にモーターへの過剰な負荷を避けられるようにしました。
リンクを動かした時の動作の見た目が良かったため機構の評判は良かったのですが、2次ビデオ撮影時に使ってもらえず、その後の会議で残念ながら取り外されることが決まってしまいました。出場できてもこの機構はお披露目できませんでした。設計者の意図と使用者のニーズの相違ということで今後の反省ですね。
R2持ち上げ機構
ベルトの直動によりR2を持ち上げる機構です。可動部にR2のフックをひっかけて、そのまま上に持ち上げます。R2には補助輪が取り付けられており、R1のつけられた壁をころがって垂直に上がることができます。大雑把にいえば、垂直方向のカタパルトです。アイデア的には、エレベータを参考にしました。エレベータにはカウンターウェイトのおもりがあるのですが、代わりに定荷重ばねで引っ張っています。モーターの定格から計算したスペック的には静止時ならばR2の重量の2倍くらいなら持ち上げられるはず。壊れるほどの重量の試験は怖くてできなかったので、機構的な最大値はいまだ不明です。持ち上げるとフレームがミシミシいいます。(ねじ止め部分がずれることでなっていると予想していました。)
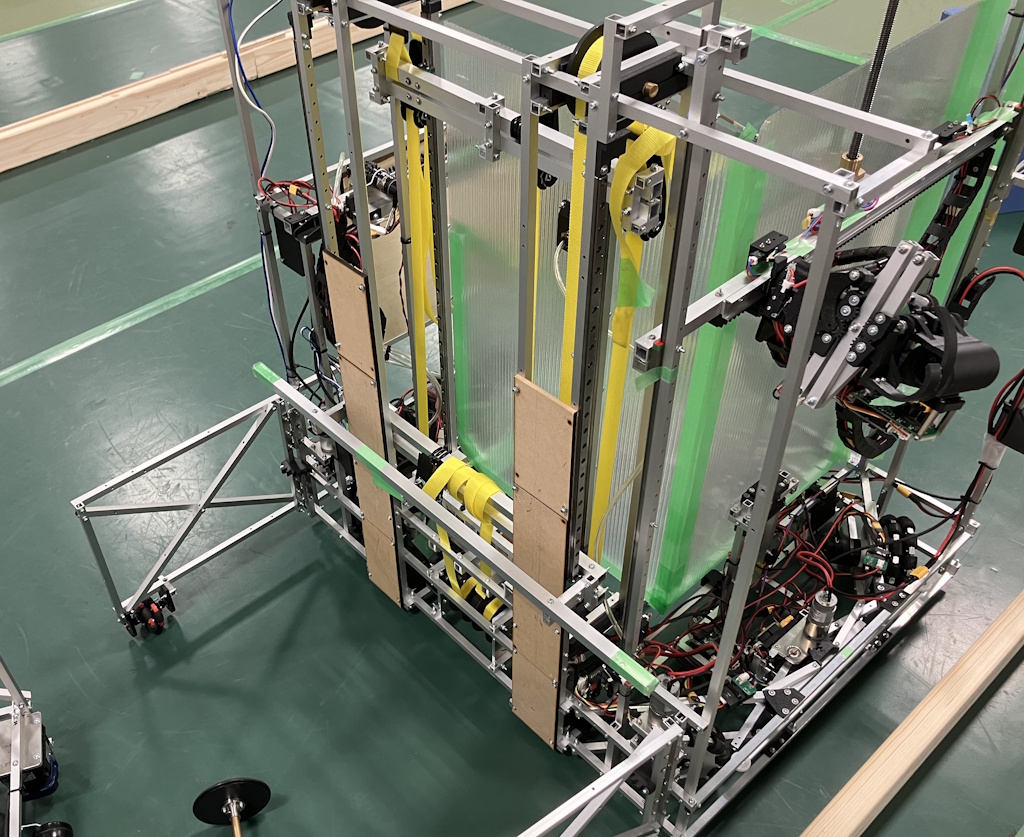
R2が軽くなる分、R1は多少重量がかさんでもよいとのことだったので、R2持ち上げ機構は一部安全面にも気を使いました。去年のNHKで動作試験時の怖い話は何個か聞いたので、明らかに事故が起こりそうなR2持ち上げを少しでも安全にできるように配慮を行いました。具体的には、動力の伝達にはナイロンベルトを用いて指を切ったり、締めつけられたりする事故を避けました。上下方向は限界以上に物理的に動かないようになっています。その部分のフレームの間には隙間が空いているので、手を挟む事故を防ぐことができます。(それでも指挟む部分はあるし、R2を壊しそうで怖いことには変わらないですが。)ナイロンベルトは、タイダウンベルトの金具で簡単にテンションをかけられるので、その点も利点ですね。
後はメンテナンス性もこだわりました。一番大きな機構なので、壊れても簡単に機構のすべてを解体して修理するというのはできないです。モーターやプーリーへのアクセスはできる限り楽なように配置し、本番での故障の際に試合時間の間で何とか交換できるようにと配慮しました。(フレームやリニアガイドごと曲がったらさすがに厳しいですが、練習ではそのような事故は起こりませんでした。)
アウトリガー
R2を持ち上げる際にバランスが崩れないように、支えるための機構になります。観音開きになっており、R2持ち上げるときは広げて使用します。R2持ち上げ機構が一番下まで移動したとしてもぶつからないようにしているので、操縦ミスがあっても壊れません。先端の地面との接触部をオムニホイールになっているため、観音開きをスムーズに行えます。
KFS置き場
プラダンを使って、秘伝書置き場を作りました。2段目の秘伝書は吸引を用いて落ちないようになっています。秘伝書回収アームの項目でも話した通り、アームと干渉しないものを目指し作成しました。一段目は底が台形になっているため、少しずれて掴んだとしても向きを直して掴みなおすことができます。
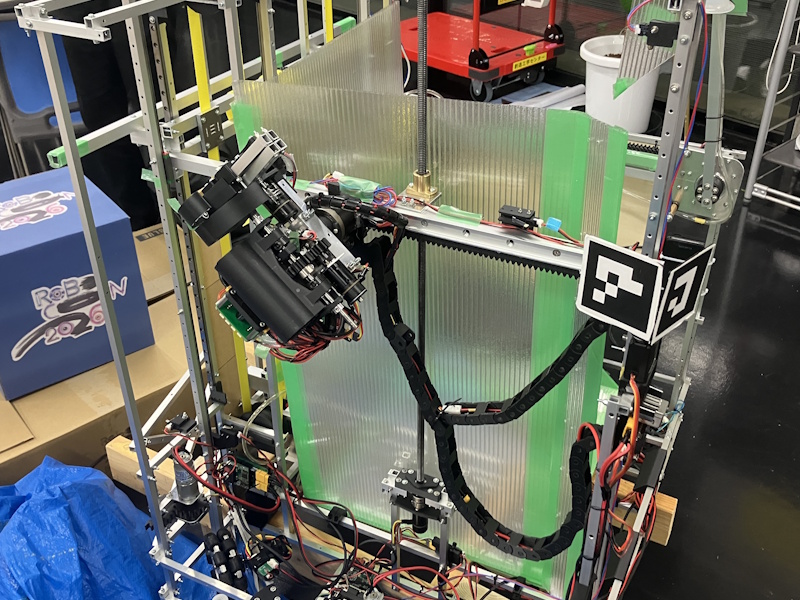
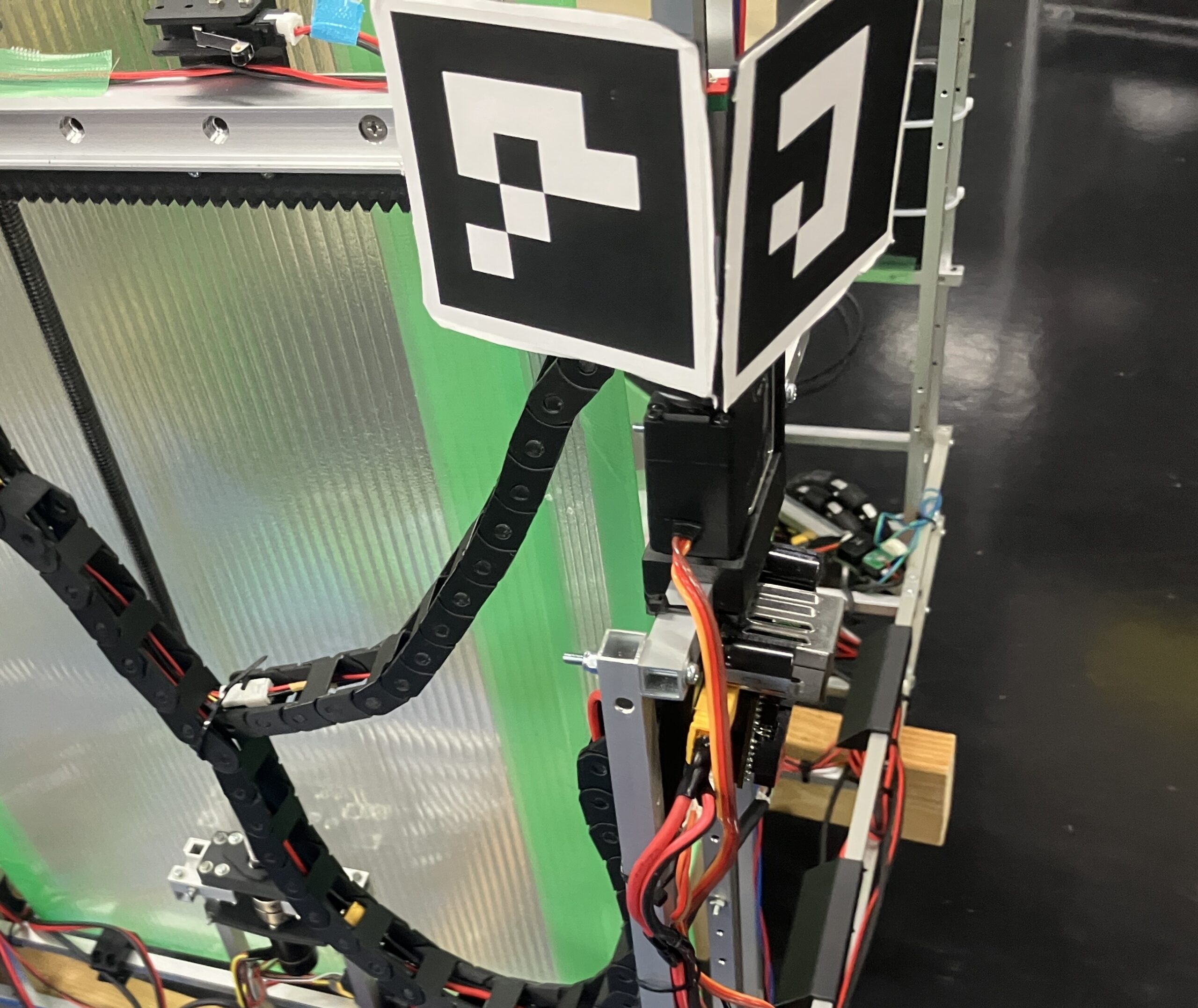
ArUcoマーカー
武器合体の判別用にArUcoマーカーをつけました。本当はディスプレイだったのですが、ArUcoマーカーを印刷したものをつけただけになっています。先輩に作ってもらいました。
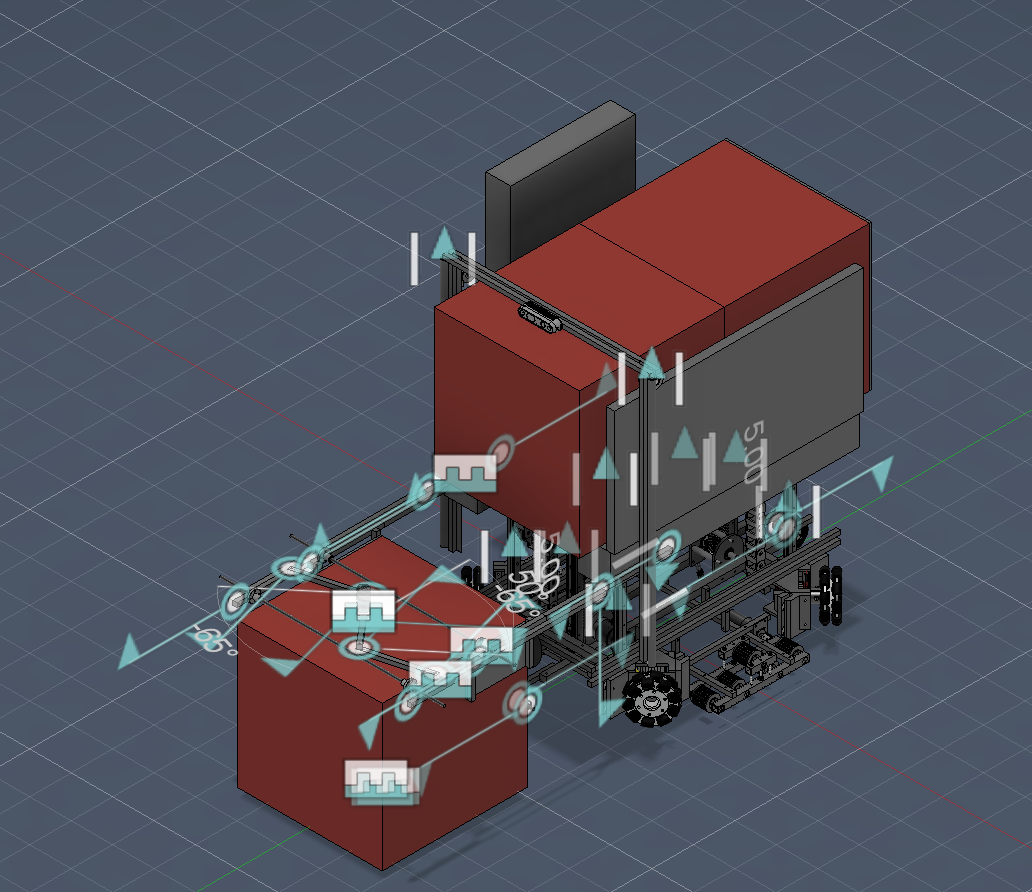
おまけ R2の足回りの初期案
最初にR2の段差越えの足回りのコンペをしたとき没になった案があるので、ここで供養をさせてもらいます。ABUのルール発表直前にXROBOCONが開催されており、観戦させてもらったのでその機体に影響を受けて設計をしました。
コンセプトとしては、以下の3つ
直動が動作時に引っかからないようにする。
段差越え時の負荷に耐えるために、剛性を高くする。
どの方向への移動も対応できるようにオムニホイールを採用する。
結果として出来上がったのが、クソ重&モーターの配線割とムズイな足回りでした。簡単な動作確認しなかったのですが、10kgくらいのおもりを上に載せても動いてくれそうでした。おおよそ設計通りといった感じです。
でも、重い。
実際にこのR2が作られたら余裕で20kgは超えてたことでしょう。重量的には持ち上げがきつくなってくるラインです。でも、多くの大学は直動+先端にタイヤの構成でR2を作成すると思うんです。私たちがR2に最終的に採用した段差越えと同じことをする大学は少ないと思うんですよね。その点で自信があったのですが、実際に見せられなくて残念です。
各大学はどのような段差越えを行うのか、本戦が楽しみです。
最後に
いかがだったでしょうか? 機構を作成しているときに考えたことをできる限りまとめたつもりなので、どなたかの参考になればうれしいです。
来年こそは本戦に出場できるように部員一同がんばりますので、今後とも応援よろしくお願いします。