はじめに
こんにちは。2026年度 T-semiゼミ長のさんのです
今回は今年も出場した知能ロボットコンテスト2026、通称InRoFについての結果報告と機体紹介をしていきます。
2026年、T-semiは今春新しく入部した新入生で構成された3チームに加え、その他上級生で構成された4チームの、計7チームがInRoFへと出場しました。
Game results and Robot Info
こちらのページより2026年度のInRoF結果がご覧いただけます!
T-semiの結果は以下の通りです。
InRoF2026 結果
新入生チーム 成績
(新入生team1)
C42
チーム名:ファーストゼミ
ロボット名:ししゃも
最終盤でかなり完成度をあげてきましたが、惜しくもとどかず0点
もう少しで自由ボールは入りそうでした。
(新入生team2)
C28
チーム名:二郎部
ロボット名:大高
上級生の影響が色濃くでているチーム名とロボット名の新入生team2、
機構が全て動かせない不具合の中、なんとか動くように奮闘していましたが0点。こちらも自由ボールまでもう少しでした。
(新入生team3)
C26
チーム名:サードゼミ
ロボット名:sakana-
ローラー型の機構となったteam3、安定したライントレースと機構により、自由ボール含め大量11点。近年の新入生チームではトップクラスの成績となりました。
敗者復活戦では14点とさらに得点を伸ばしました。
上級生チーム 成績
C47
チーム名:梅雨のロボまつり
ロボット名:白くて深いお皿
こちらは2年生が4人集まって製作した機体になります。
執筆者も制御として参加しました。
ゴルフボール回収機に着想を得たユニークな機構でしたが、機体不具合により、自由ボールを入れることができず0点敗退。悔しい結果となりました。
C53
チーム名:バチリス サブチリス
ロボット名:非常食
こちらは今年のT-semi唯一の完全個人による出場でした。さらに今年のT-semi最小機体。自由ボールを確実に入れ1次予選 敗者復活戦ともに5点。小さいながらも、緻密な作りの機体が印象的でした。
C23
チーム名:高橋隆造
ロボット名:BrackRack-S
昨年、同大会においてT-semi所属で決勝に出場したロボット「BrackRack」、この機体の開発者が引き継がれ一部改造して出場。昨年よりも軽やかな動きをみせました。
結果は1次予選 敗者復活戦ともに5点。ライントレースをしない挑戦をしていました。
C22
チーム名:旧二郎部
ロボット名:コマぴーろー
今年のT-semi最高成績チームです。新規開発の6軸ロボットアームを搭載しています。細やかな制御理論の駆使により、見事にアームを使いこなしました。今年のT-semiでは最も開発期間をかけています。
1次予選 9点、
敗者復活戦 14点、
二次予選では
21 + 審査点 32.67
= 53.67点
本番では着実に調子をあげていました。
C48
チーム名:動物園
ロボット名:ばか殿
こちら番外編になります。直前期に開発を急ピッチですすめていた本チーム。
それがたたったのか、当日ロボットを動かすメンバーが寝坊。あえなく、棄権という形になってしまいました。
機体紹介からは省きますが、高性能2DLiDAR+吸引機構による機体となっていました。
機体紹介
新入生チーム
新入生チームは全てステッピングモーター+ライントレースを用いた機体となっています。
使っているマイコンはArduino nano
これらをベースにして新入生チームは様々に機構・回路を製作しました。
新入生team1 ファーストゼミ
吸引アームを用いてボールを複数機体内にスタックすることが可能になっています。
ブレードにより、広い範囲のボールを集めることが可能になります。
ライントレースの際にブレードがフィールドに接触する問題があったため、当日にはブレードの素材を変更していました。
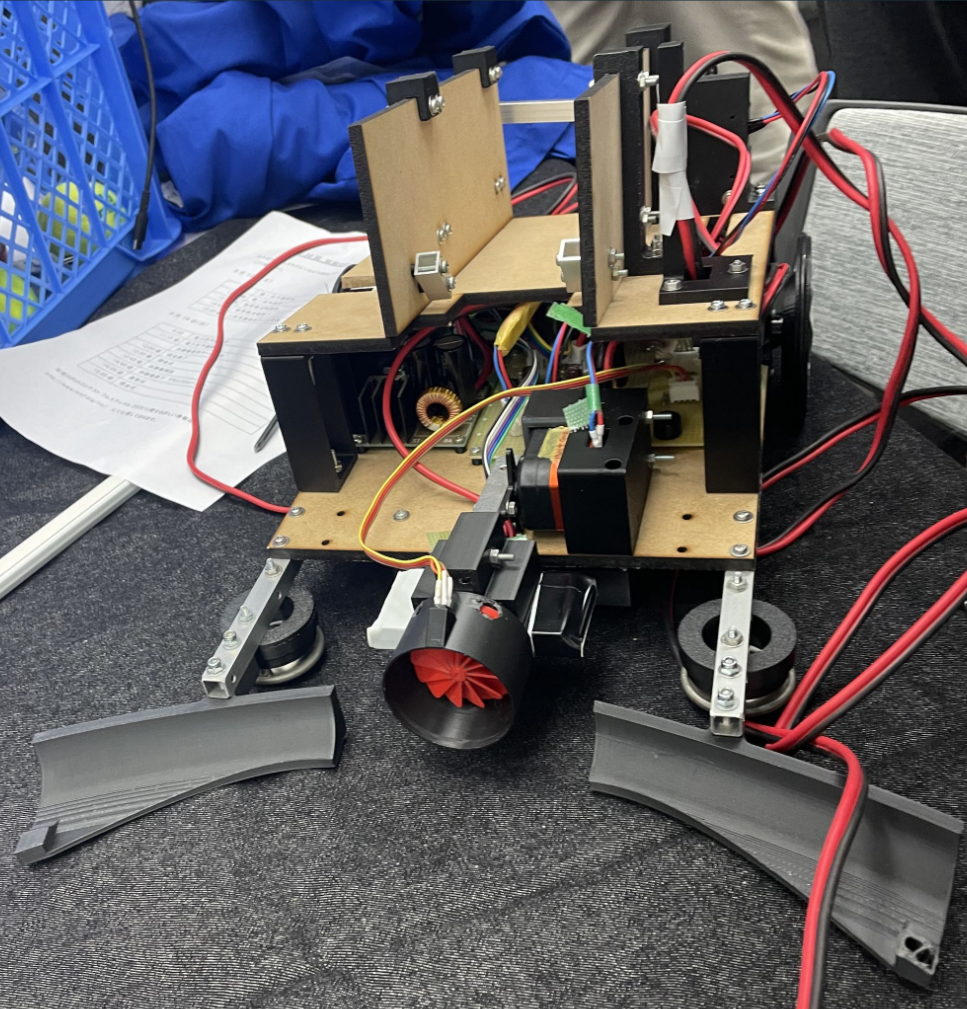
新入生team2 二郎部
このチームは2軸リンクの吸引アームに加え、射出機構を備えています。
吸引射出ともに首振り回転ができるなどスペックが高い機体です。
マイコンのArduino nanoのピン数の不足が発生し、回路まわりは難しい部分がありました。
この機体は、今後も開発して全ての機構を動かしたいそうです。
新入生team3 サードゼミ
ローラー機構で回収して、複数のボールを回収しスタック、そのあと赤ゴールへと射出するという手法で大量得点をマークしました。
ローラー機構、射出機構において、ボールを移動させるために結束バンドを採用しているのが印象的でした。
制御に多くを頼らずとも、ボール回収→射出までができるようになっており、非常に安定性がありました。
上級生チーム
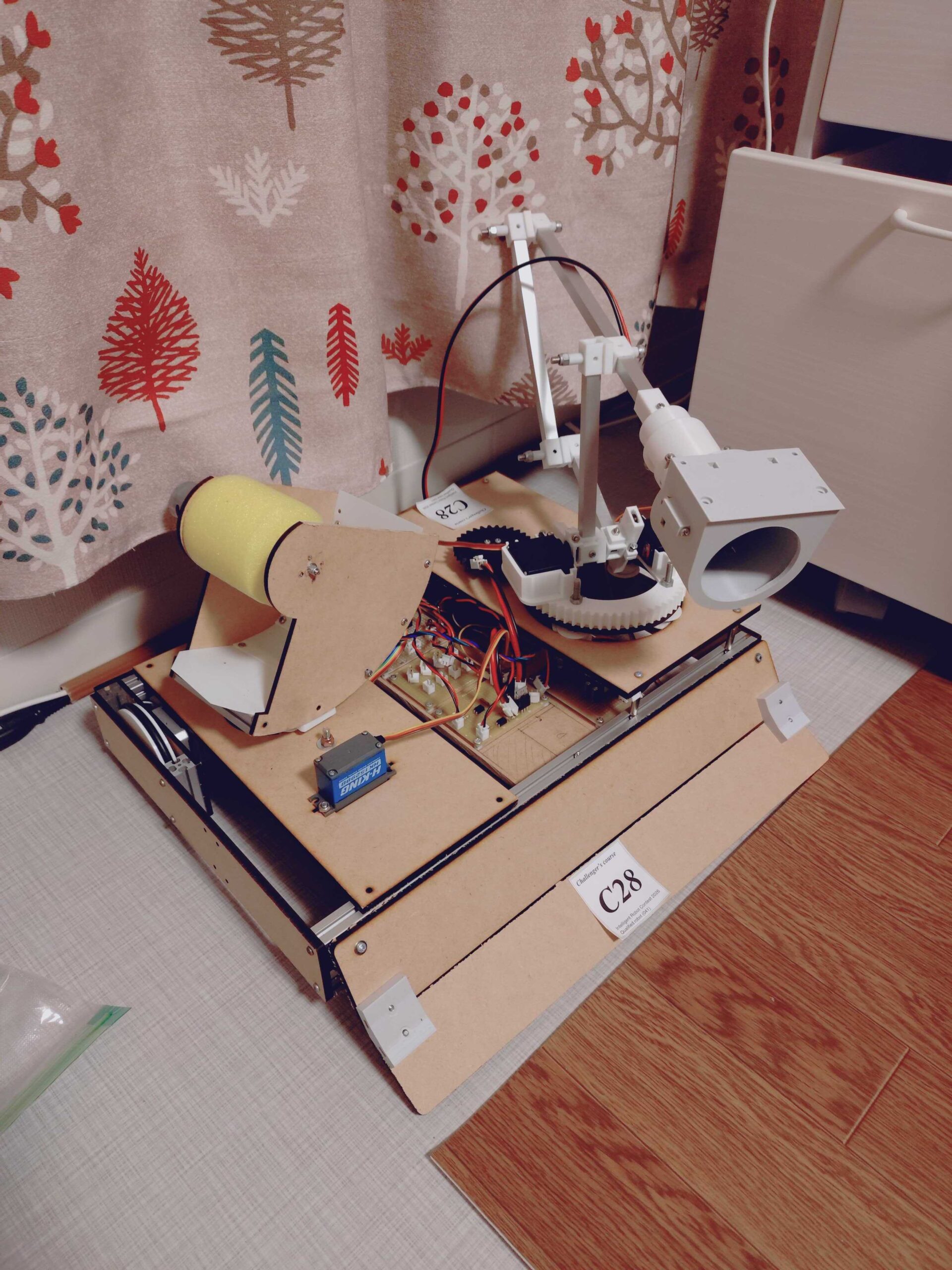
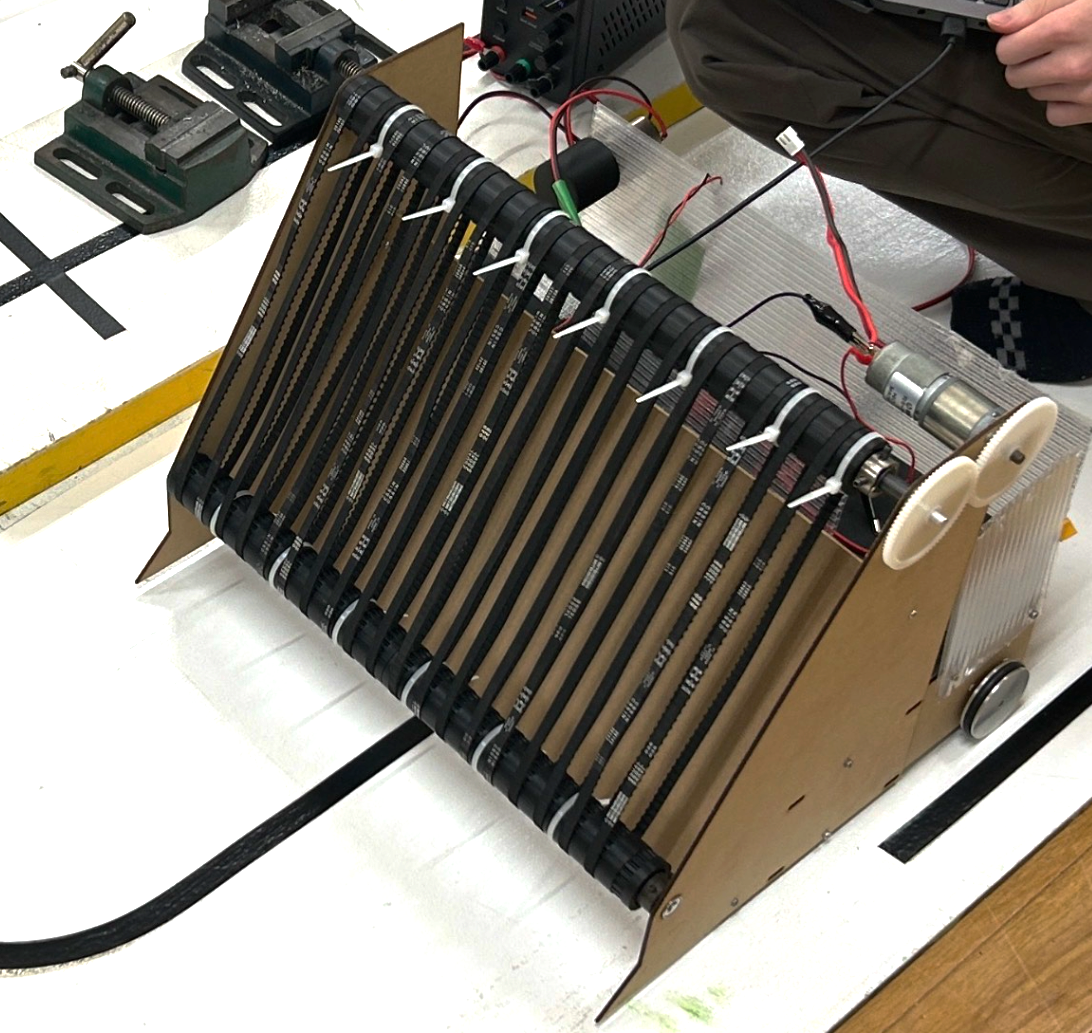
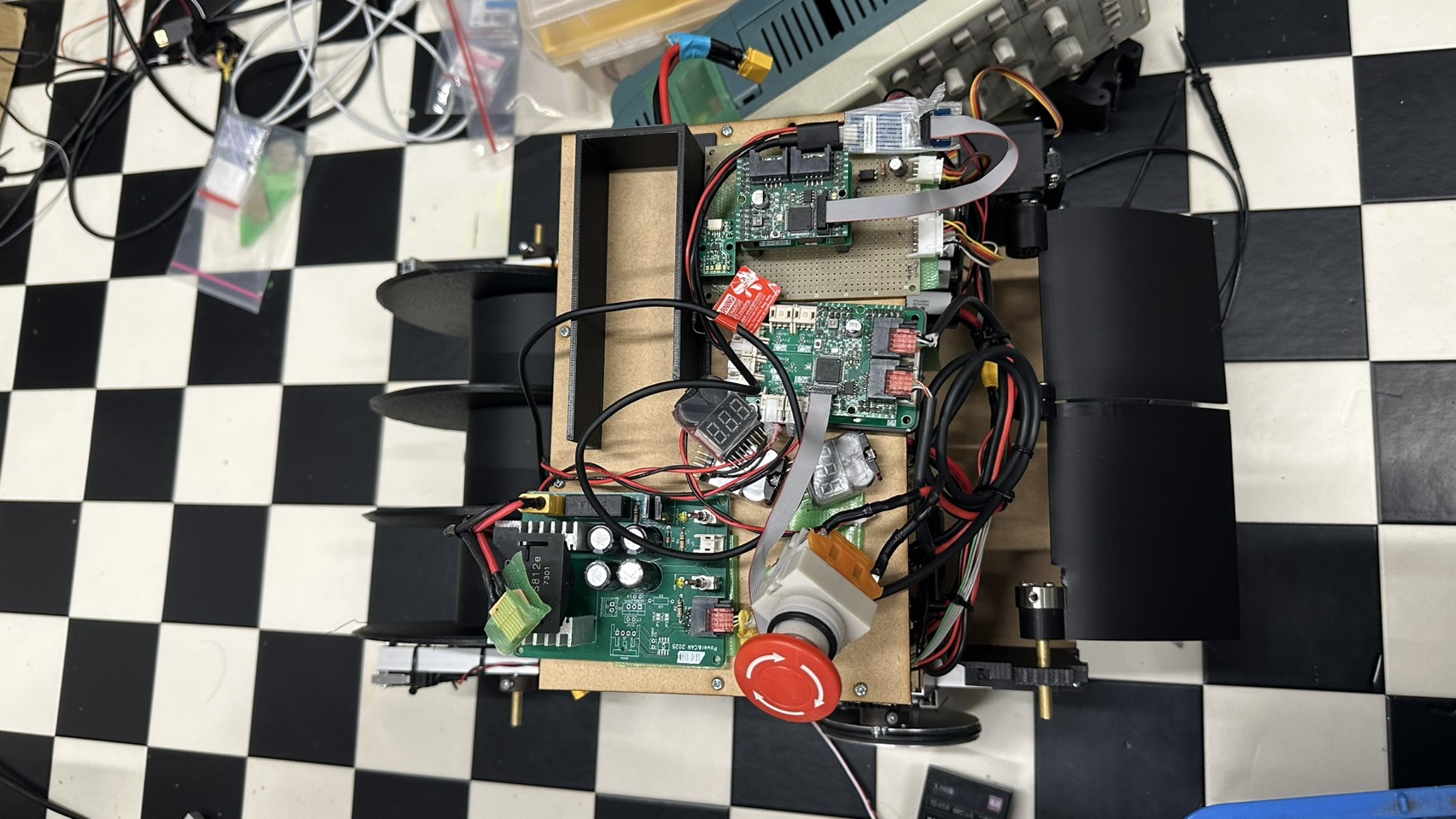
梅雨のロボまつり
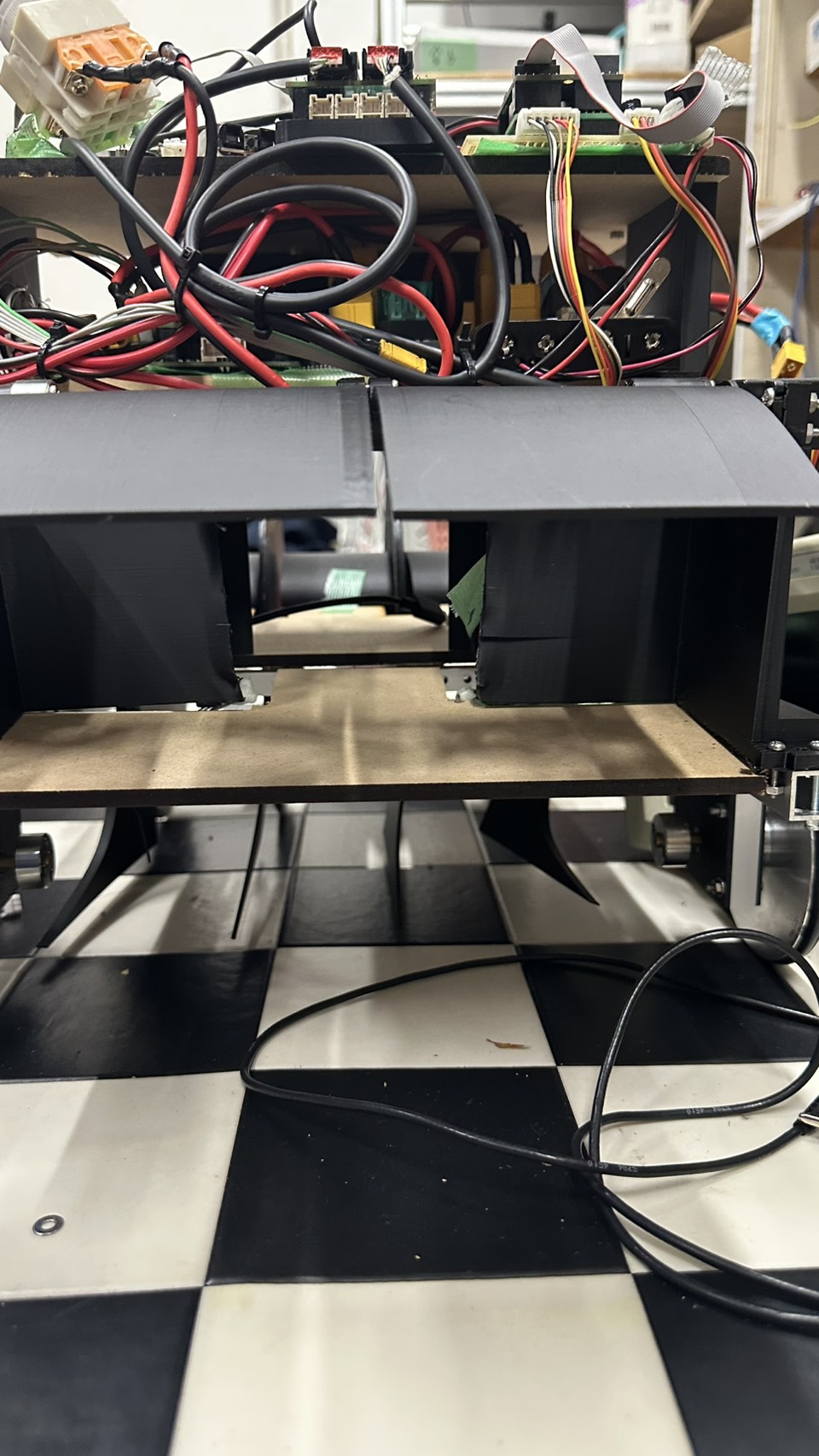
スポンジボールが機体の下を通った後、円盤と円盤の間へと誘導されます。
そのまま円盤の回転にともなって摩擦によりボールが持ち上げられ、機体上部へと格納される機構です。
制御を必要としない機構となっていて、機体が前進するだけでボール回収を行うことができます。しかし、スポンジボールの絶妙な摩擦に苦しめ目られ、スムーズな回収には困難がありました。
InRoFはボールが機体に干渉しないよう注意する必要がありますね。
のっている回路はラインセンサ、IMU、AMTです。最終的にはセンサーの力で決め打ちとなりました。
バチリス サブチリス

全てを3年生の個人で開発をしていました。
オムニホイールを自作するなど挑戦にあふれています。
全てのアクチュエーターがサーボで構成されています。
カメラを下向きに設置して、カメラによるライントレースを実現させました。本番ではアームの使用まではいかなかったものの、今後開発が進んだ姿が楽しみになる機体でした。
高橋隆造
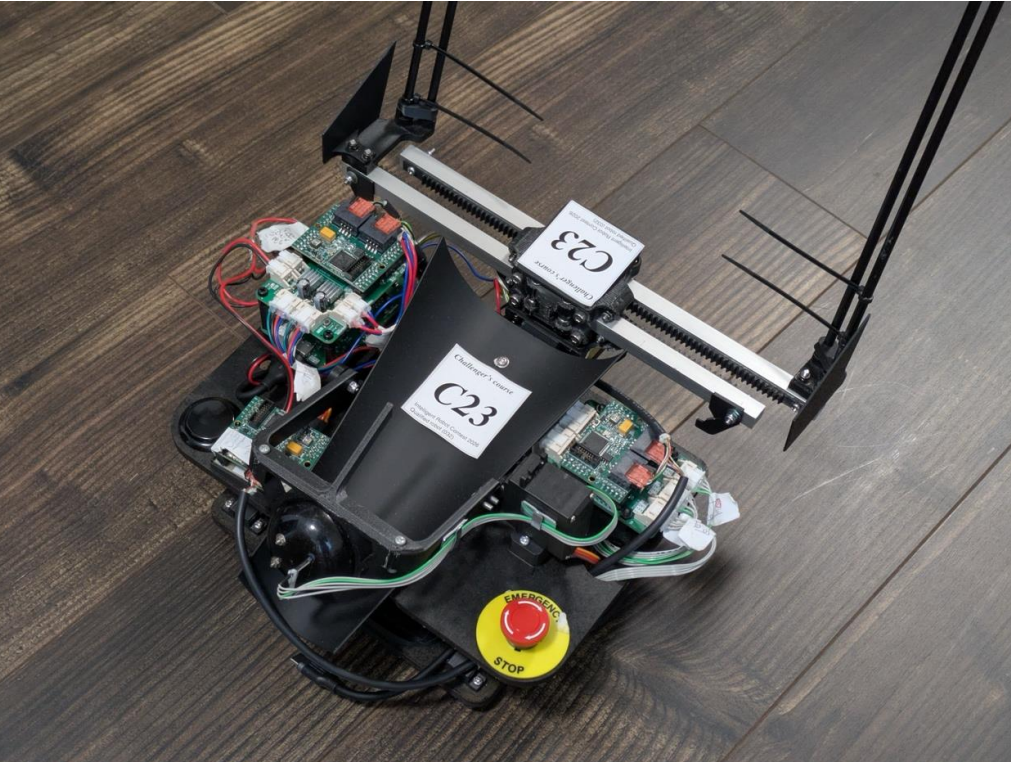
広範囲のボールを掬って格納する、基本的な姿形は2025年の「BrackRack」ですが、中身には大きく手が加えられています。
オプティカルフローセンサーとIMU、そして補正用の距離センサによりフィールドでの自己位置推定を行っています。
これらセンサーの力により、従来のライントレースではなく、スタートゾーンから直接ボールゾーンへと向かう挑戦をしていました。
決勝に出場可能なレベルで機体のポテンシャルはもともと高いため、これが完璧に動く姿をぜひ見てみたいですね。
旧二郎部
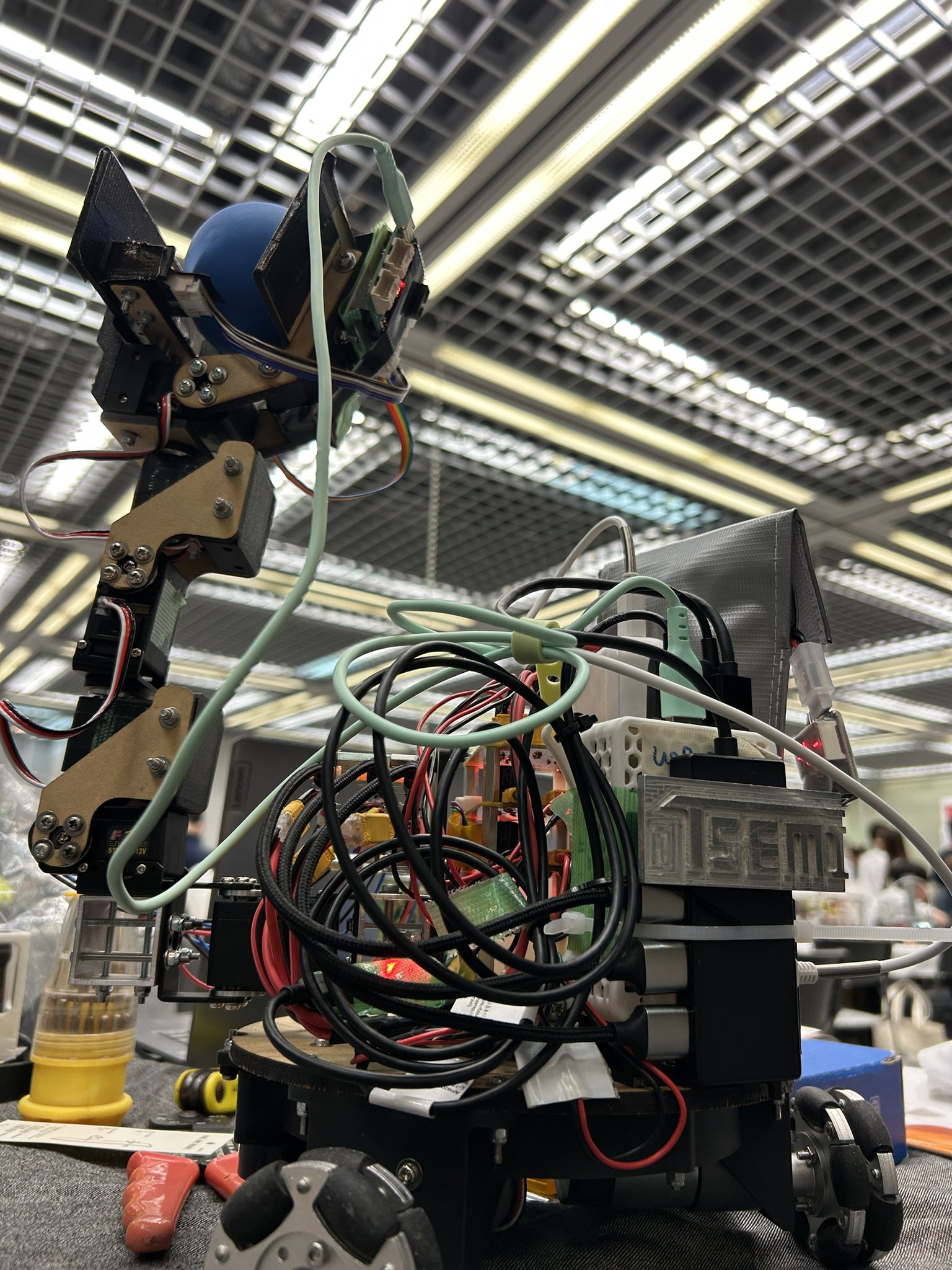
2025年のInRoF、そしてやさロボに続いて今年と、地続きの開発となっているチームになります。
昨年までは吸引によるボール回収でしたが、今回新たに6軸アームを採用。
強化学習により、効果的なアーム制御を目指していました。
自己位置推定は2DLiDAR、卓越した制御理論が様々に組み込まれています。
キーワードとしては、
– モンテカルロ位置推定
‐ ダイクストラ法動的経路生成
‐ DBScan ボール検出
‐ PPO で強化学習
だそうです。
冬頃東京で開催される予定のやさロボへと開発を続けていくそうです。
今後の活躍に特に期待です!
さいごに 法被について
T-semiではInRoFに出場する際、青い法被を着用して出場しています。
知能ロボットコンテストにおいて、T-semiは青い法被を着た集団となっています。
法被は、T-semi OB会よりご援助をいただいております。
この場を借りてお礼申し上げます。
法被を作成する際、背中の漢字を毎回変更しています。今回は「研」の字の法被をメインで着用しました。
国際卓越研究大学の「研」の字をイメージしています。
写真は、今年の出場時のものです。
「越」の字もいっしょですね
来年もこれらの法被を着て頑張ります!