早いもので、T-semiがJLCPCB様(jlcpcb.com/JPV/ ・ jlcpcb.com/jp/)からいただいたご支援も6回目となりました!いつもありがとうございます!今回は技術紹介もあります!
JLCPCBについて

JLCPCBは、安価かつ高品質な基板製造サービスを提供する中国のメーカーです。PCB製造から部品実装(PCBA)まで対応し、試作から量産まで幅広く利用できます。CNCや金属3Dプリント、基板レイアウトサービスなど様々なサービスを提供しており、格安で利用することができます。
当団体では以前より多大なるご支援をいただいております。今回は後述の通り非常にシビアな設計の基板だったのですが問題なく製造していただけました!
JLCPCBさんのPCBAサービスでは、コンポーネント間の推奨間隔がこの通りとされています。今回の基板は部品が密集している部分がありましたが、優れた精度ですべてのコンポーネントを問題なく実装していただけました!
今回設計・製作した基板
2ch ブラシDCモータードライバ
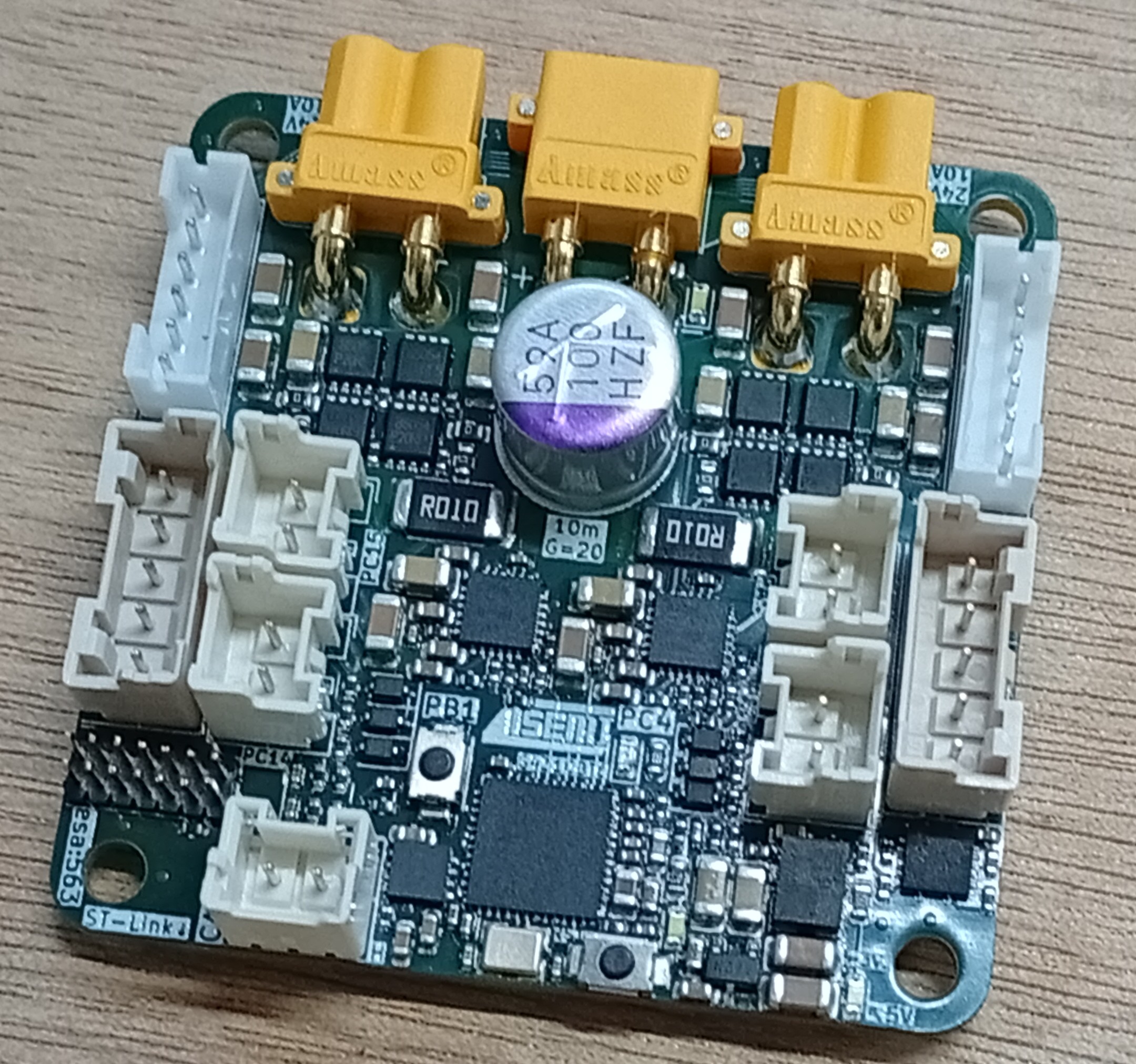
RS-385などのブラシDCモータを2つ駆動することができるモータードライバです。STM32G431を搭載し、C610のように電源とCANバスをつなぐだけで制御することができます!
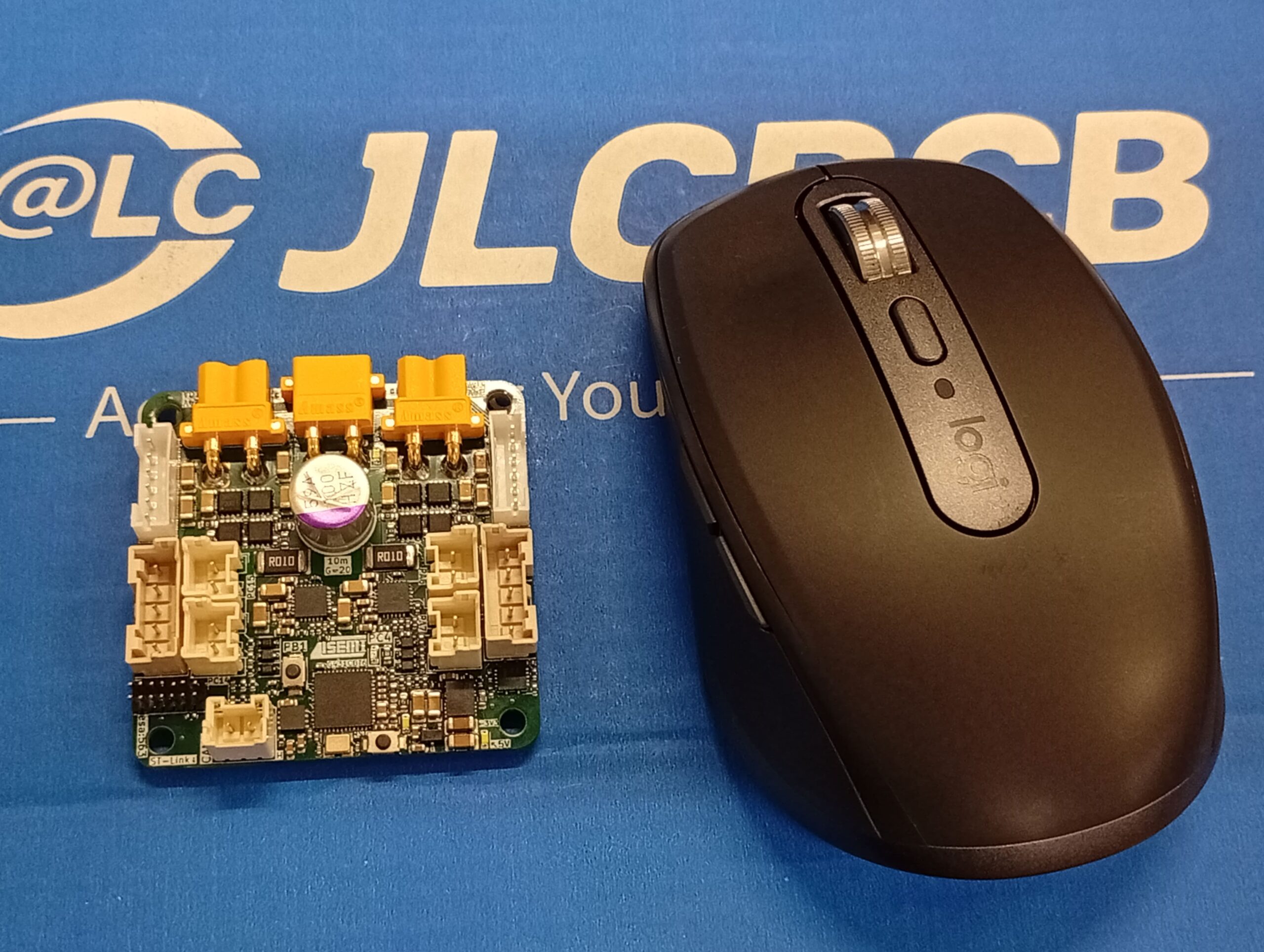
サイズ感。50mm四方です。
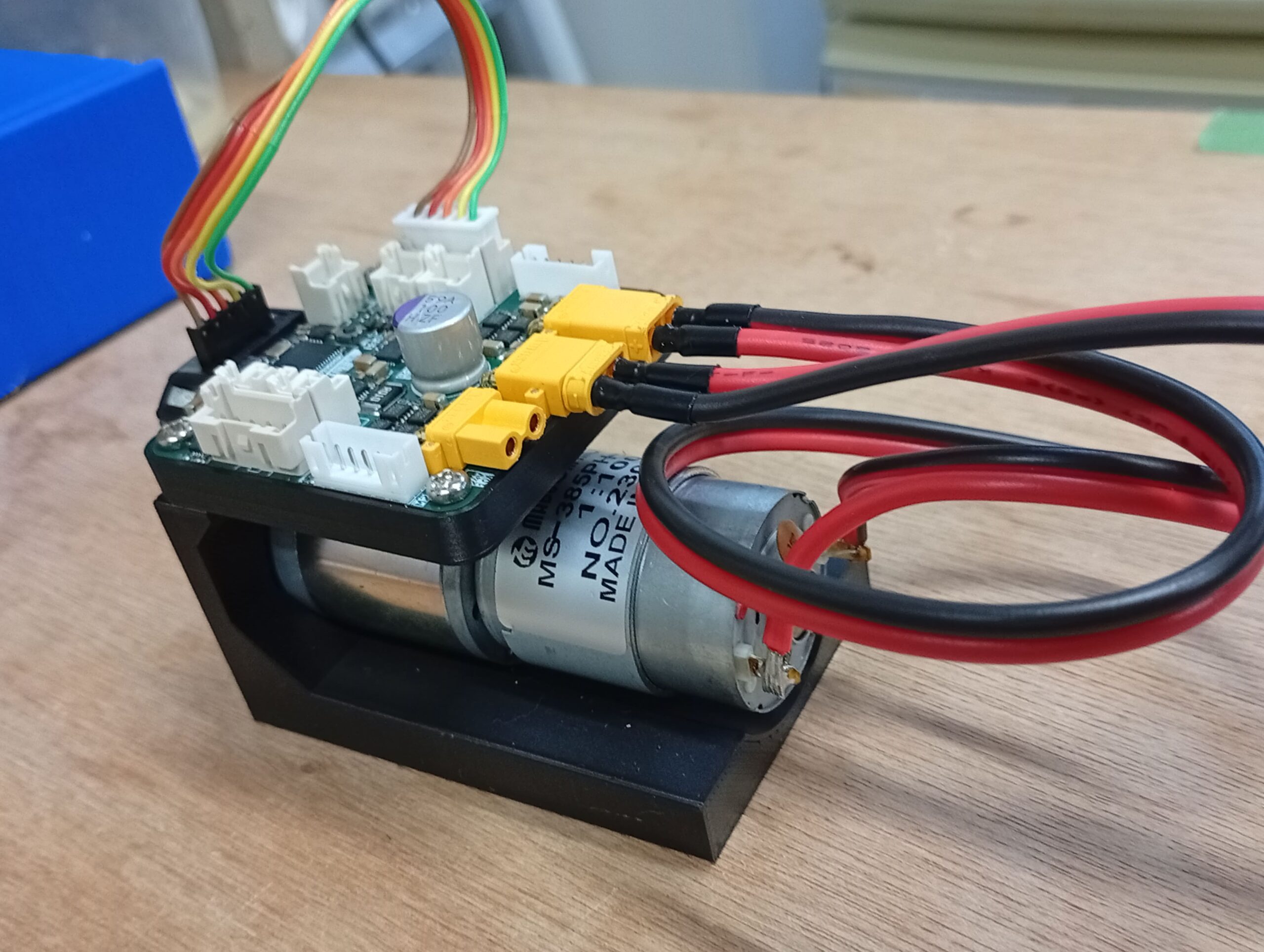
ベンチ台を製作しました。
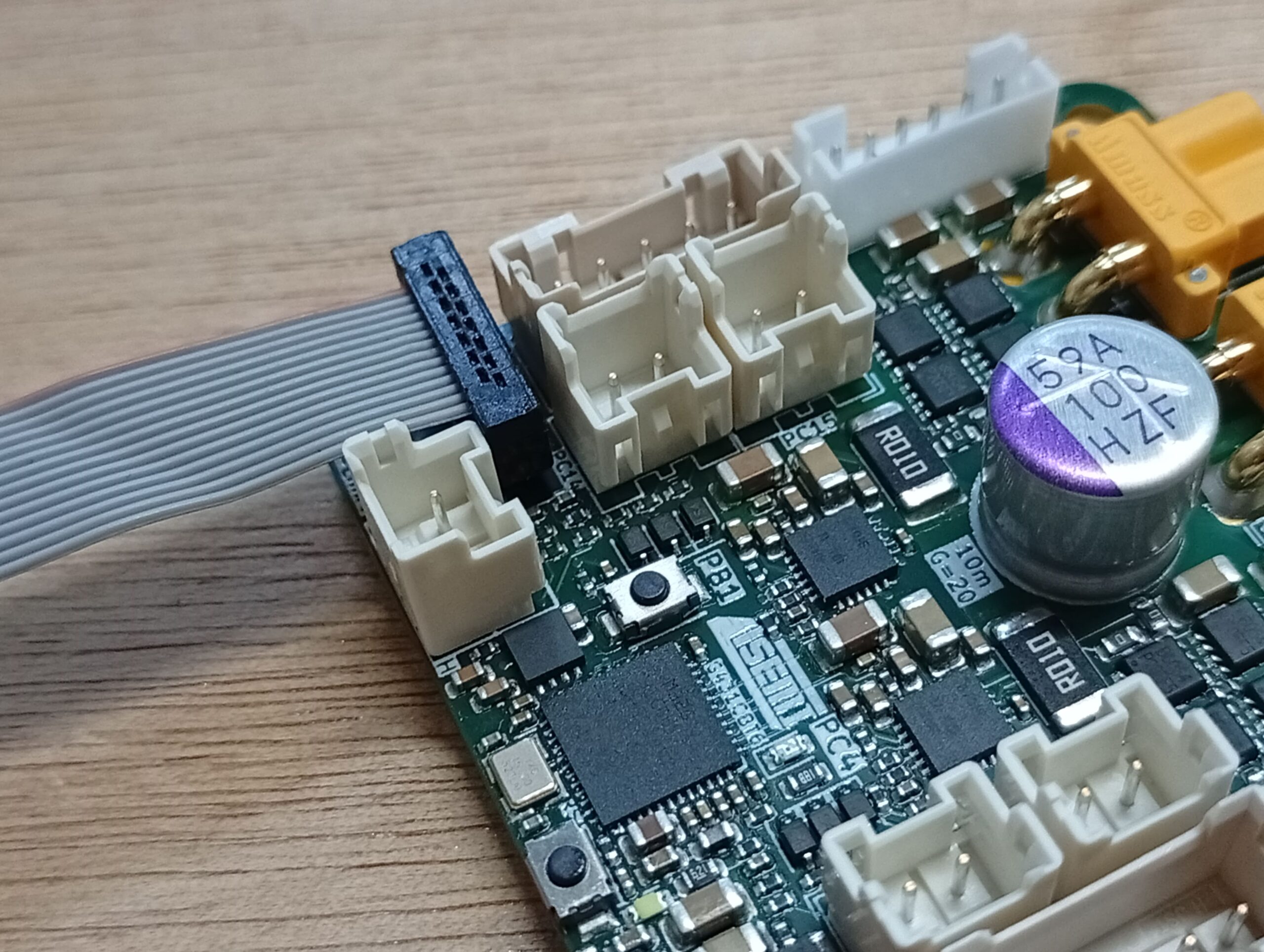
書き込み用インターフェース。ギリギリですねえ
技術紹介
概要
RS-385程度の小型ブラシ付きDCモータを2つ制御することができる、DRV8701Eを使用したモータードライバです。STM32G431CBUを使用しており、C610などのように電源とFD-CANバスを配線するだけで動作します。6層基板で50mm四方、6層なのでpad on viaが無料で使えます。
諸元
| 項目 | min. | typ. | max. | 単位 | 備考(ボトルネックなど) |
|---|---|---|---|---|---|
| モータ用入力電圧 | 5.9 | 24 | 28 | V | DRV8701 / 入力保護用のSMCJ28A |
| モータ合計電流(連続) | — | — | 15 | A | 入力のXT30PW-Mコネクタ |
| モータごと電流(連続) | — | 10 | 15 | A | 出力のXT30PW-Fコネクタ |
| モータ合計電流(瞬間) | — | — | 30 | A | 入力のXT30PW-Mコネクタ |
| モータごと電流(瞬間) | — | — | 24 | A | 電流センスアンプのSO < AVDD |
| Duty比 | 0 | — | 1 | supports 100% | |
| ゲートドライバソース電流 | — | 25 | — | mA | IDRIVE = 200kΩ |
| ゲートドライバシンク電流 | — | 50 | — | mA | IDRIVE = 200kΩ |
| 電流センスアンプ倍率 | 16 | 20 | 24 | DRV8701Eの電流アンプ | |
| 電流センスアンプオフセット(VOFF) | — | 50 | 250 | mV | DRV8701Eの電流アンプ |
| 電流制限 | — | 5 × (VREF − VOFF) | — | A | STMのDACで生成したVREF。データシートの式(1)参照 |
| ABZエンコーダ電圧 | — | 3.3 | 5.5 | V | 5V_FTピンおよびダイオードクランプされたTTピン |
| SPIエンコーダ電圧 | — | 5 | 5.5 | V | 5V_FTピンおよびダイオードクランプされたTTピン |
ピンアサイン設定
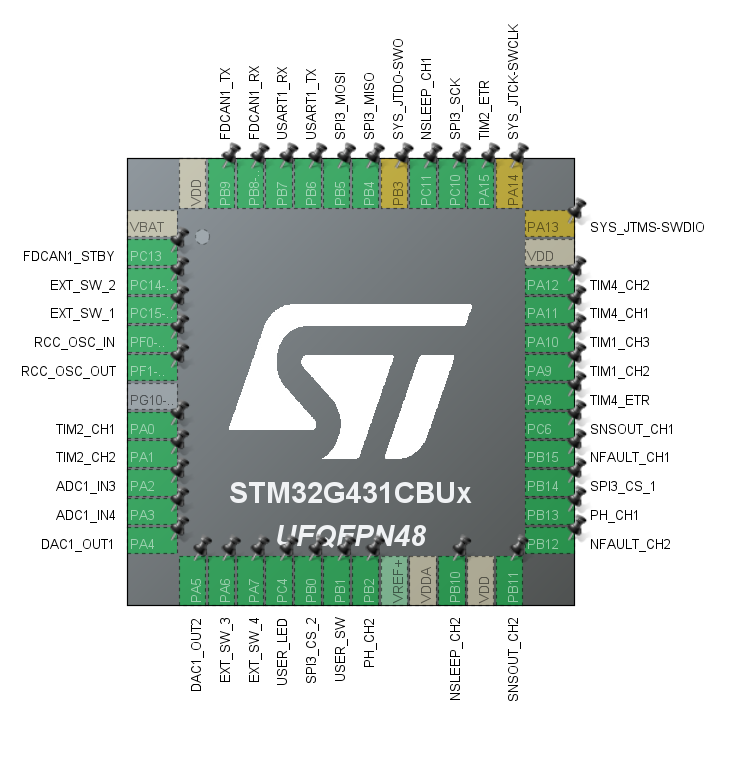
すべてのピンを使用しています。設定する場合は(何とは言いませんが)頑張ってください。
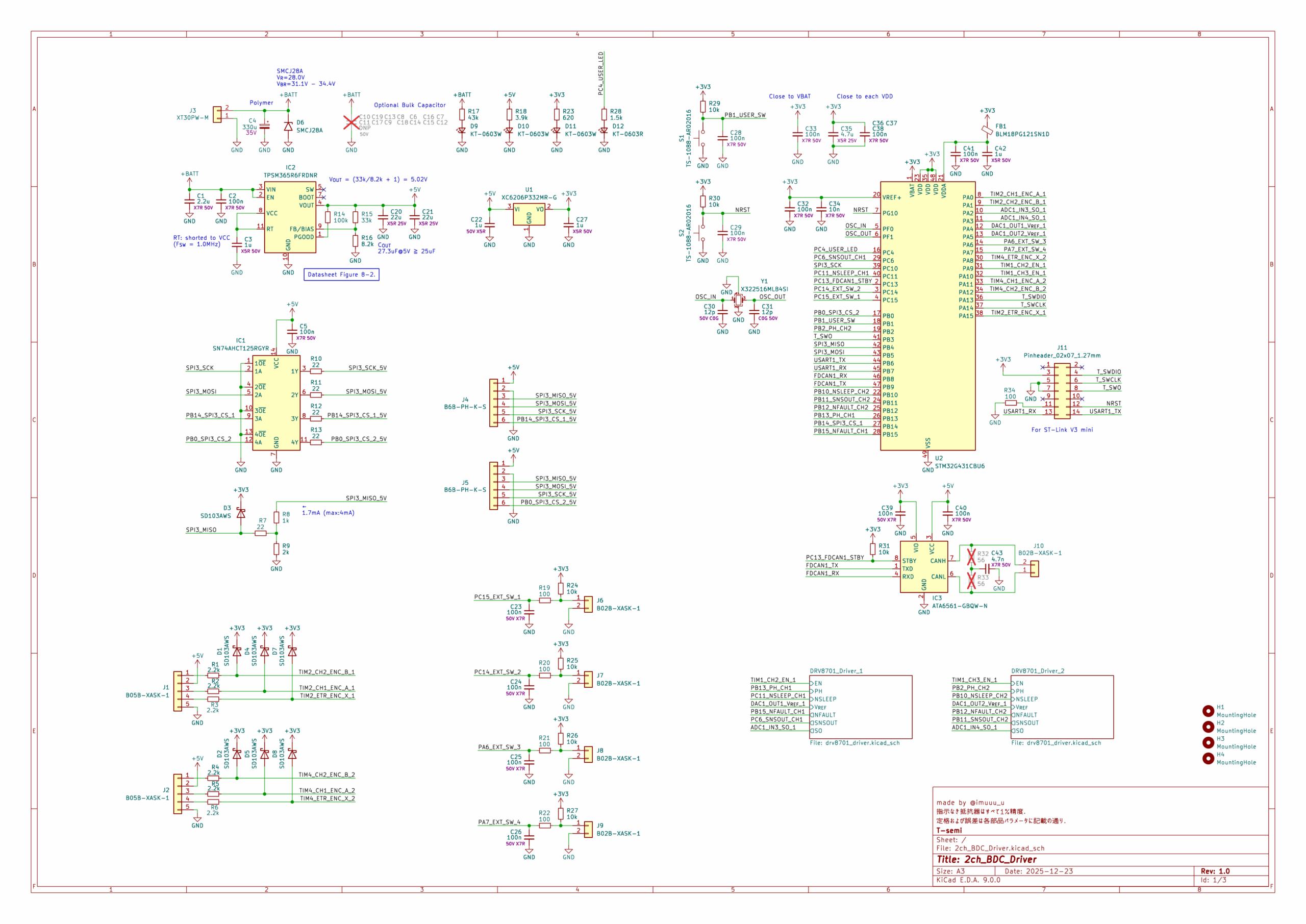
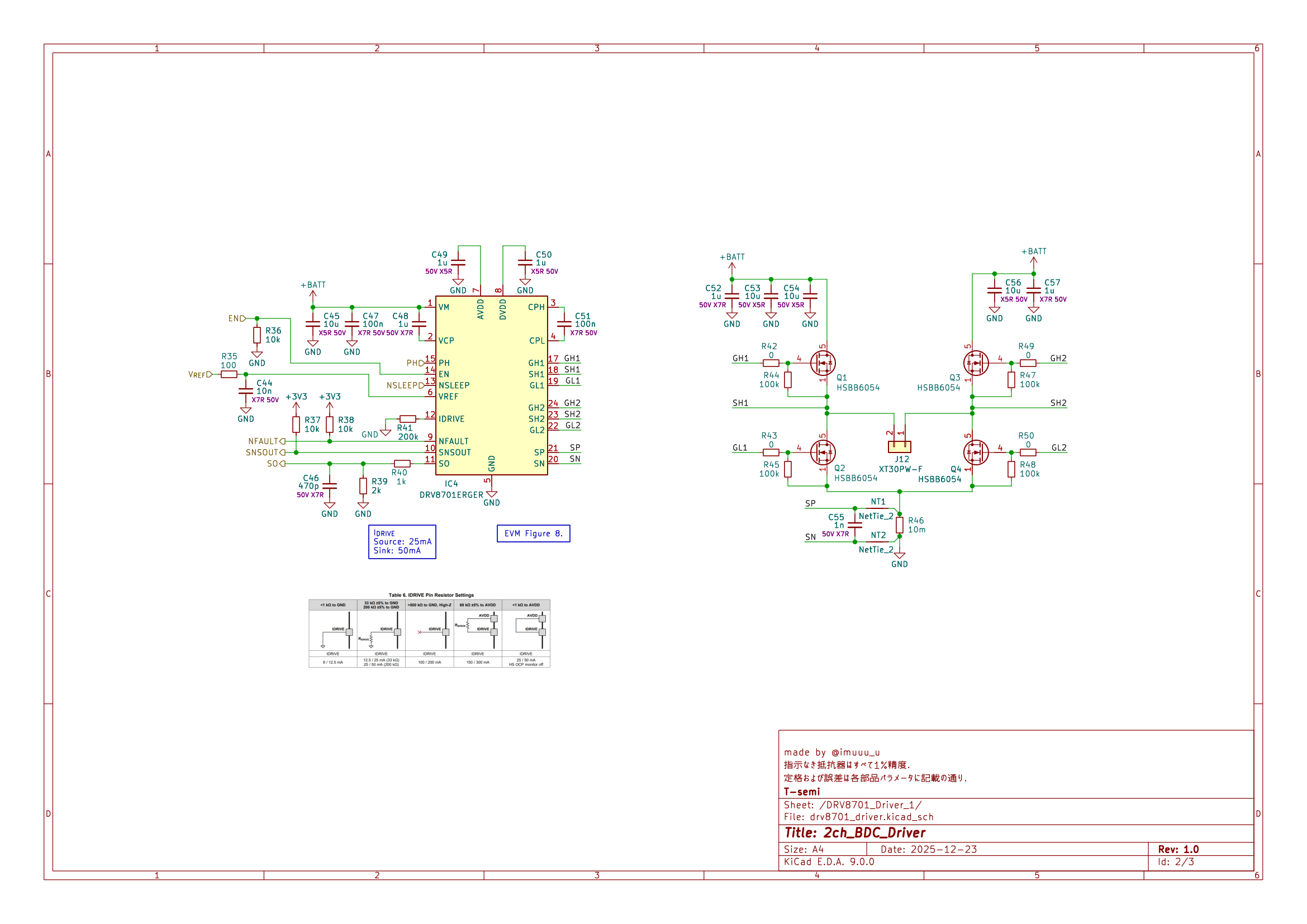
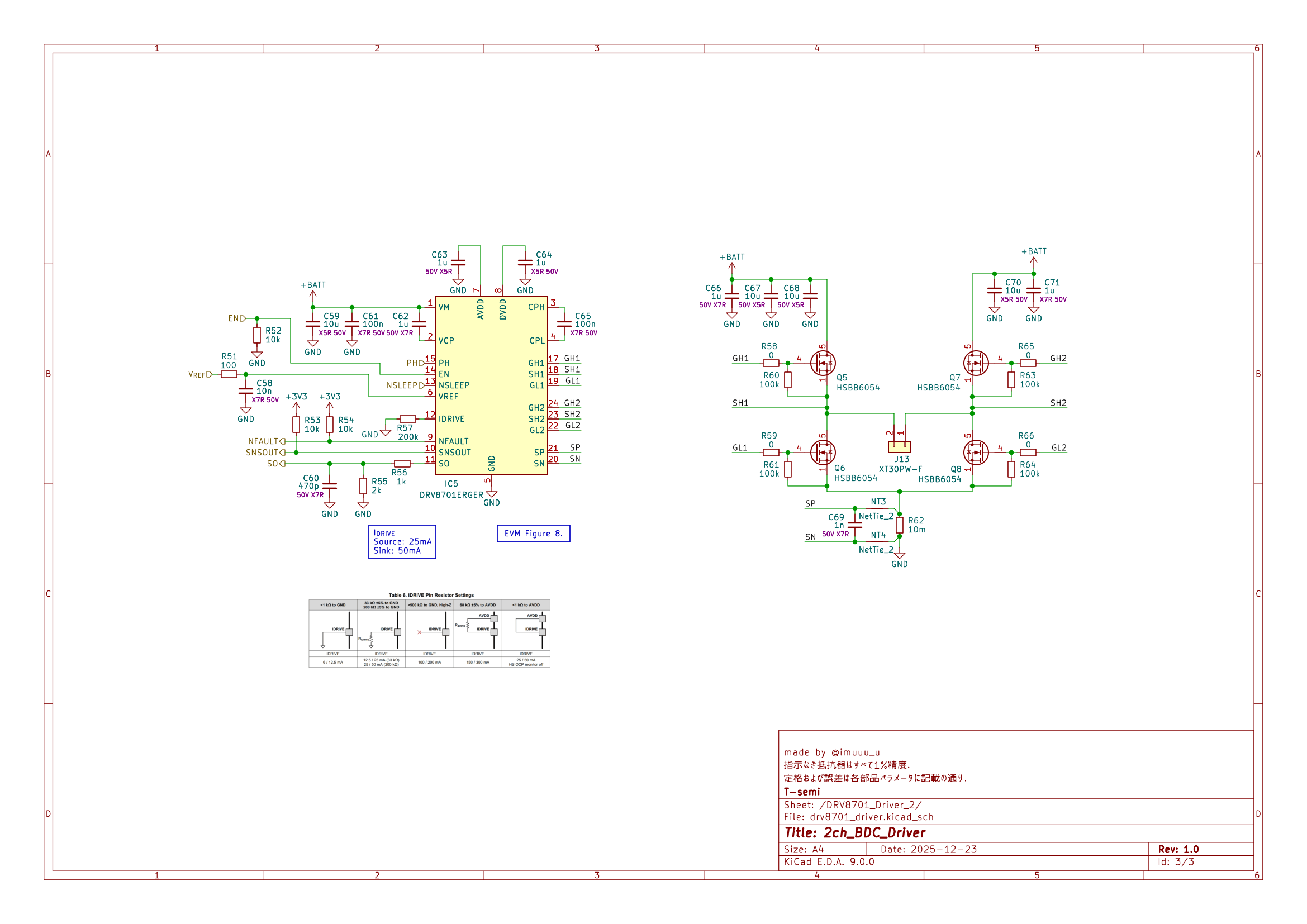
回路図
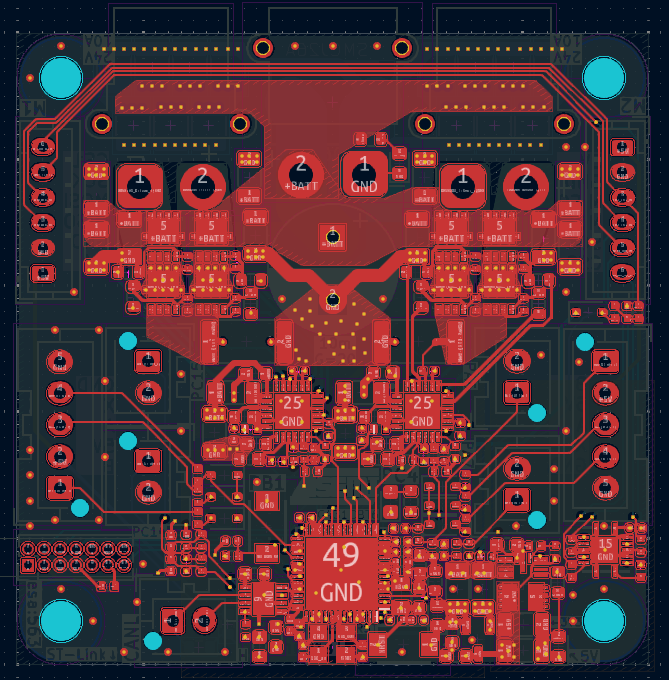
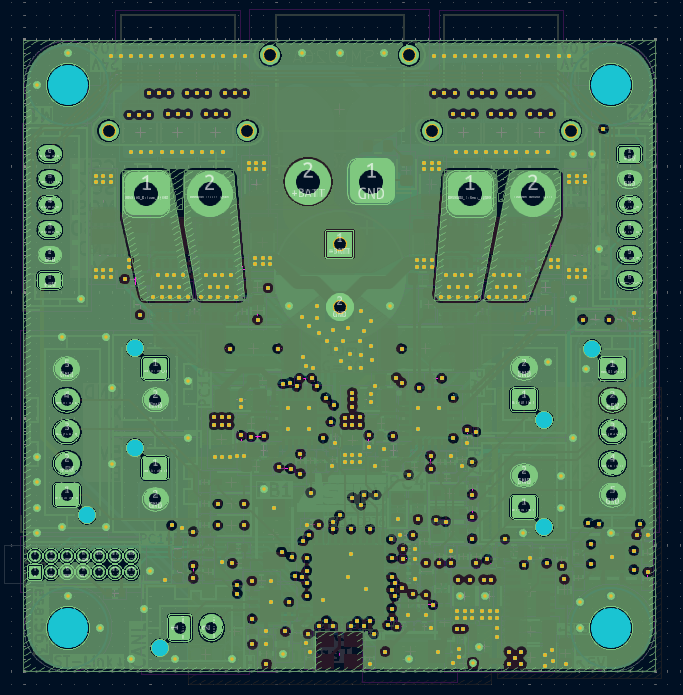
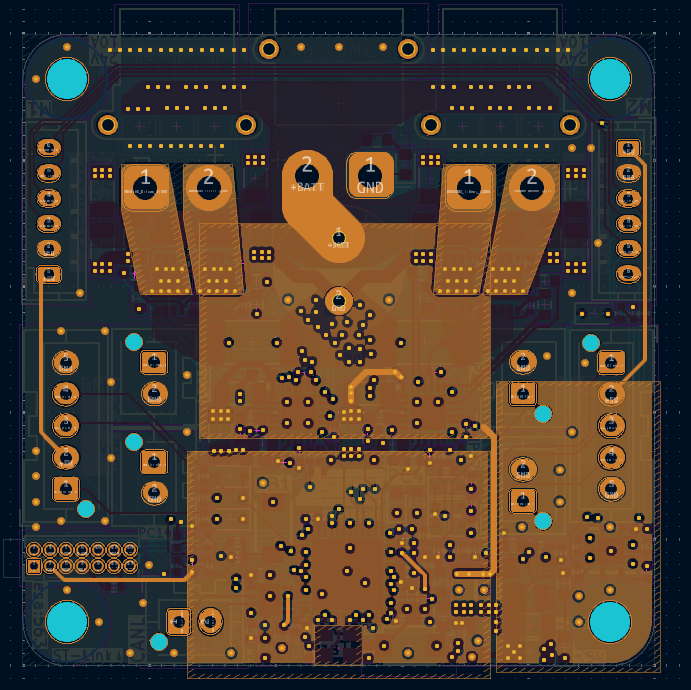
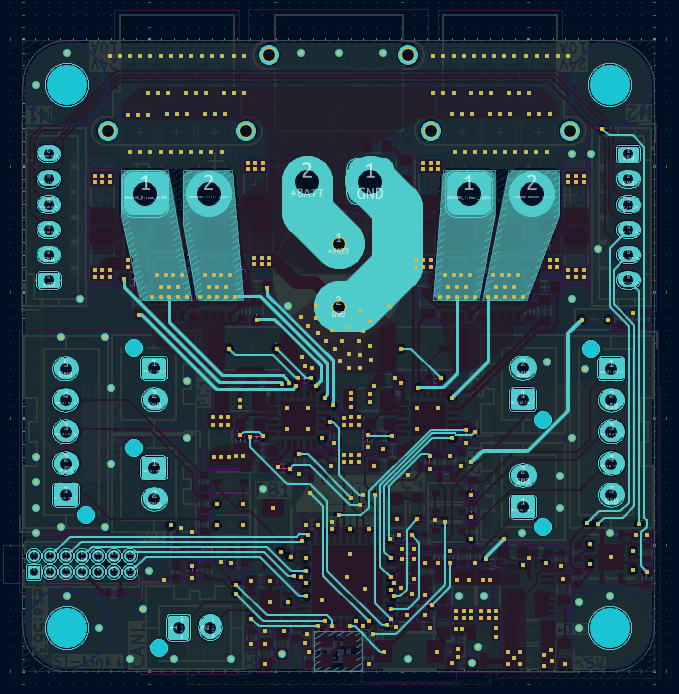
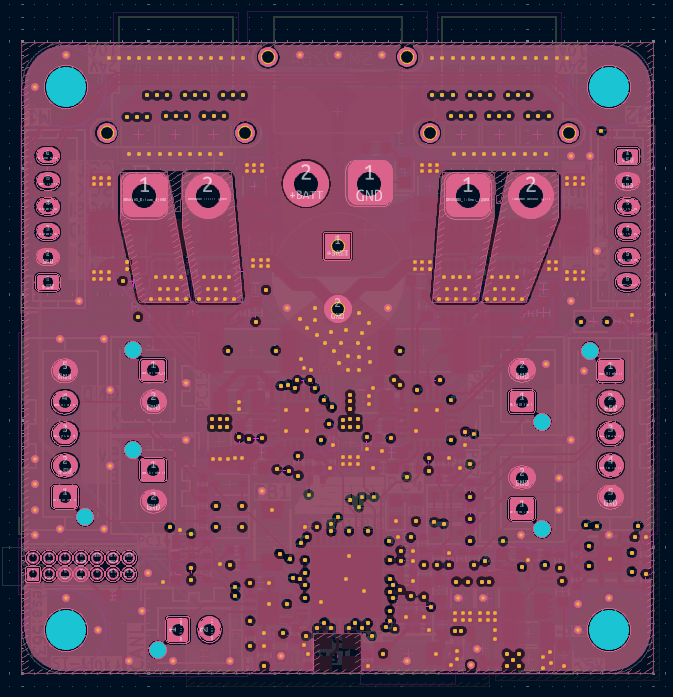
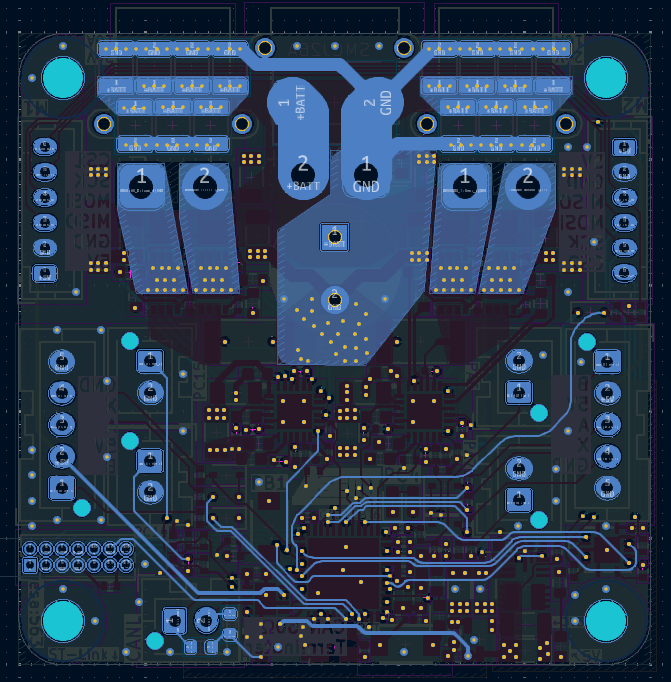
配線など
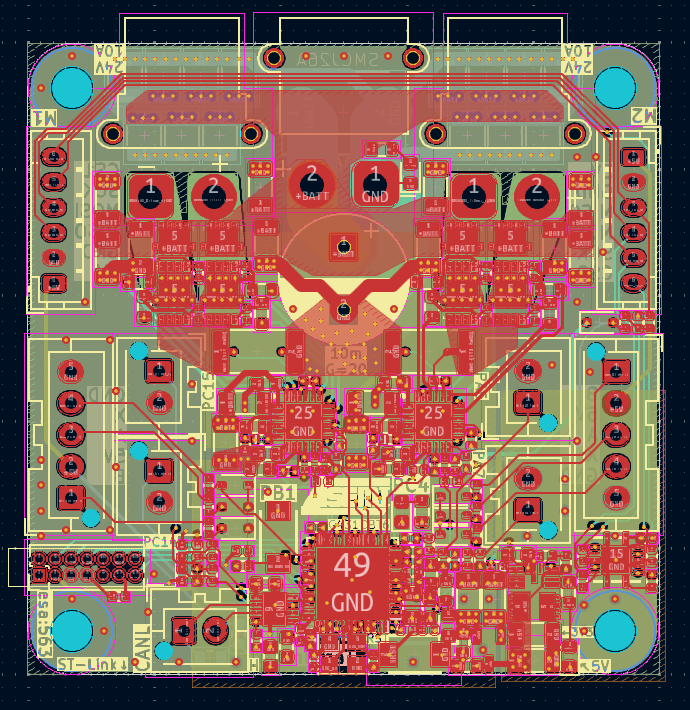
実体図・コネクタ
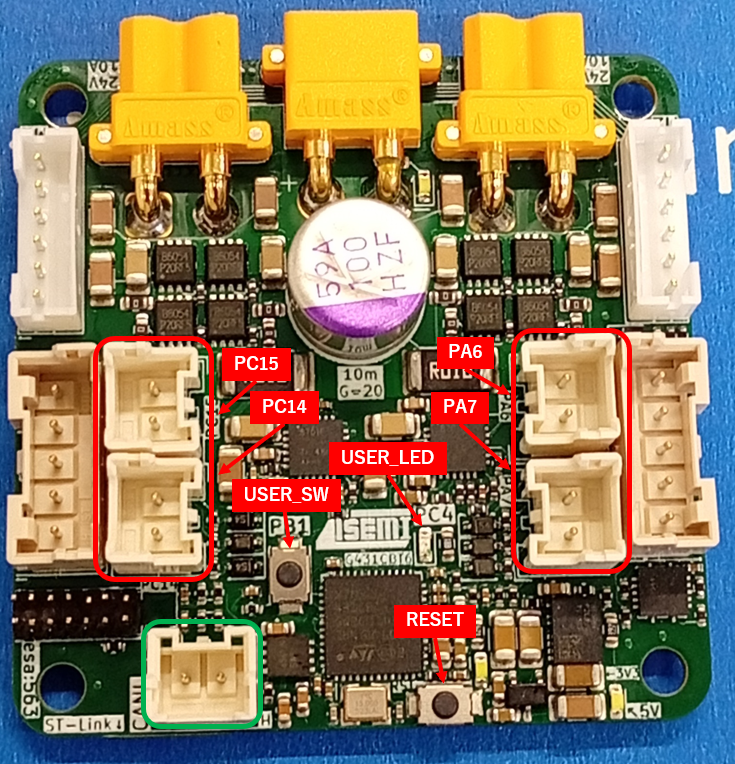
赤で囲ったコネクタはリミットスイッチ用、緑で囲ったコネクタはCAN用コネクタです。
動作説明
DRV8701の基本動作
論理表
| nSLEEP | EN | PH | SH1 | SH2 | Description |
|---|---|---|---|---|---|
| 0 | X | X | High-Z | High-Z | Sleep mode; H-bridge disabled High-Z |
| 1 | 0 | X | L | L | Brake, low-side slow decay |
| 1 | 1 | 0 | L | H | Reverse drive (current SH2 → SH1) |
| 1 | 1 | 1 | H | L | Forward drive (current SH1 → SH2) |
EN(Enable)ピンにPWMを入力して速度を制御する。PH(Phase)ピンのレベルによって回転方向を指定する。
DACで生成したで電流制限。DAC出力しないと電流流れないので注意。
おおよそDAC出力電圧に係数 がかかった値が制限値になります。詳細な値はデータシート7.3.3の式(1)参照。
制限値に当たったときにSNSOUTがLowに引き下げられます。
電流センスアンプの出力(SO)は10mΩのシャントの両端電圧を20倍するため、0.2 [V/A] のゲインをもちます。
NSLEEP(PC11, PB10)をHighにしないとスリープに入ります。
異常な状態になるとNFAULTがLowレベルに引き下げられます。以下にFAULTの例を示します。(Datasheet: Table 7)
| Fault | Condition | H-Bridge | Charge Pump | Recovery |
|---|---|---|---|---|
| VM undervoltage (UVLO) | VM ≤ VUVLO | Disabled | Disabled | VM ≥ VUVLO |
| VCP undervoltage (CPUV) | VCP < VCPUV | Disabled | Operating | VCP > VCPUV |
| External FET overload (OCP) | VDS ≥ 1.0 V or VSP − VSN > 1.0 V |
Disabled | Operating | tRETRY |
| Pre-driver fault (PDF) | Gate voltage unchanged after tDRIVE |
Disabled | Operating | tRETRY |
| Thermal shutdown (TSD) | TJ ≥ 150°C | Disabled | Disabled | TJ ≤ 130°C |
STM32G431CB
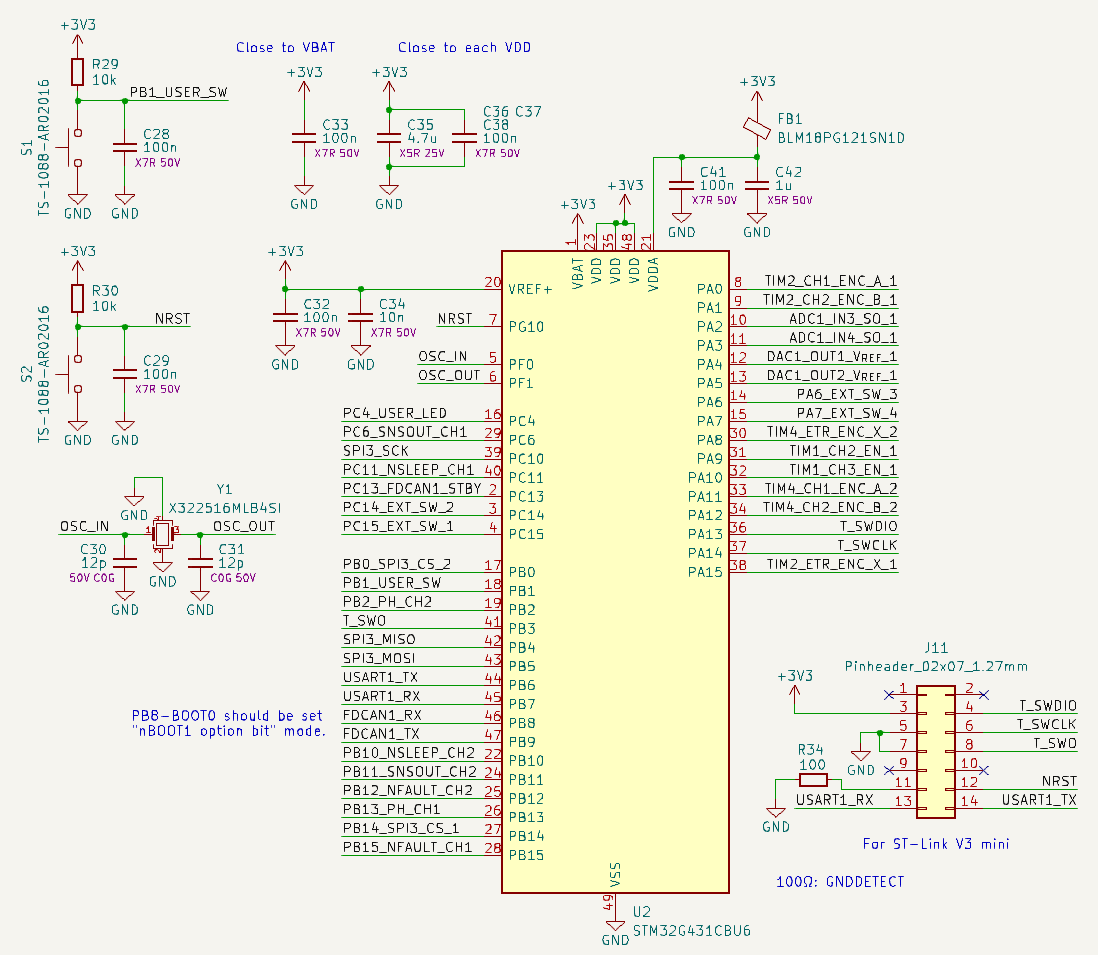
PB8ピンを使用しているため、BOOT周りで配慮が必要かもしれません。
ATA6561
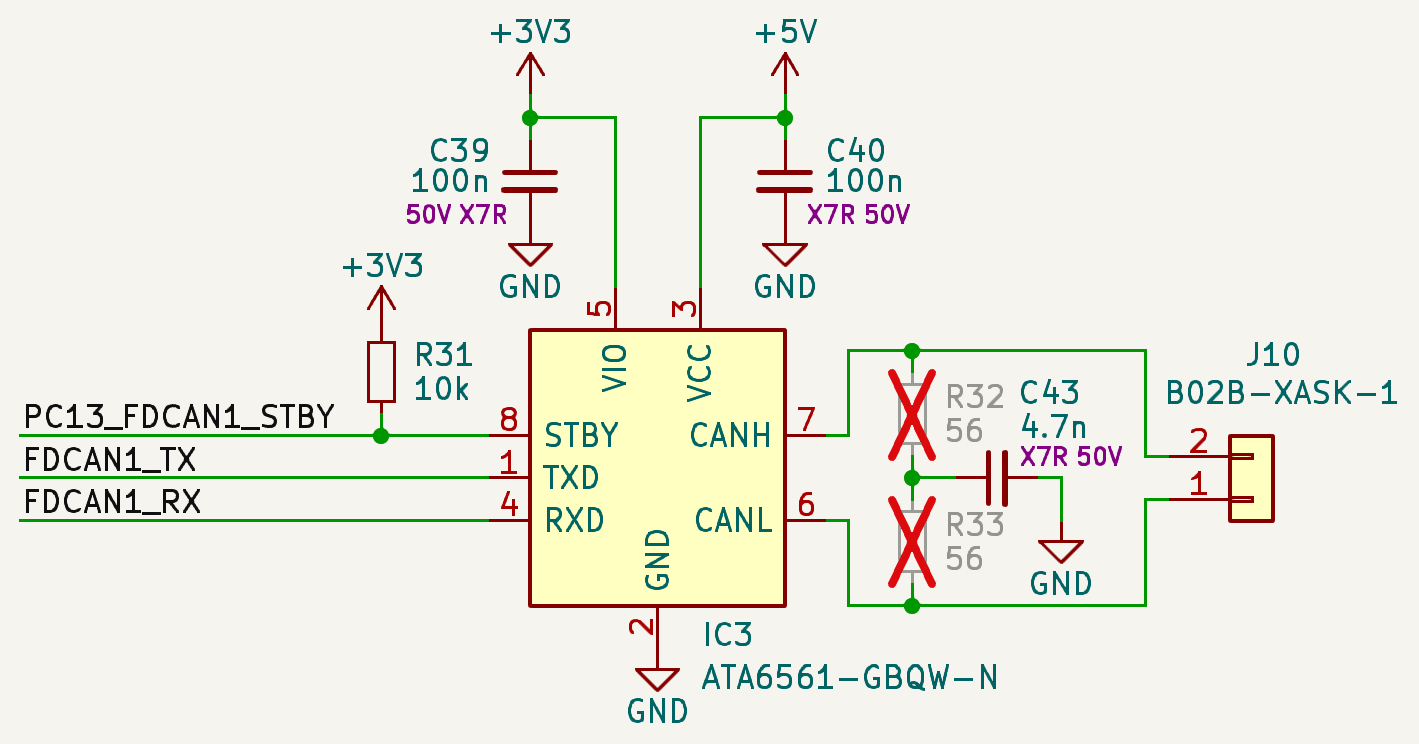
終端抵抗が必要な場合は基板裏面に60Ω付近を2つ実装すればいいです。
PC13にFDCAN1_STBYを割り当てています。ここをLowにしないと通信が始まりません。(というか、秋月で60円だからという理由で6561にしたがこのパッケージ秋月にないぞ…?意味ないじょん)
リミットスイッチなど
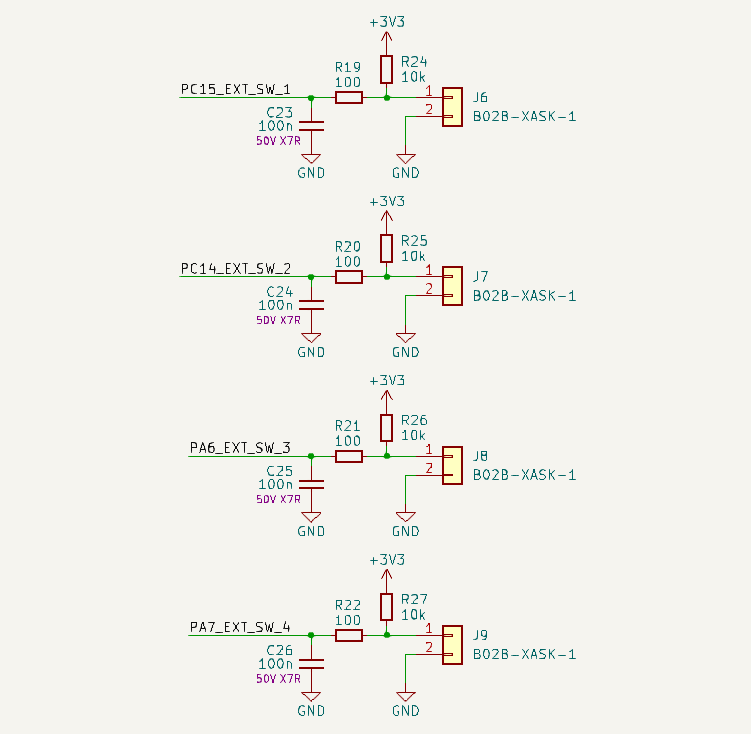
各種スイッチ接続用のインターフェースです。スペースの都合上2ピンなので他基板との互換性はないです。もっとも、スイッチ用インターフェースなら2ピンでいいやろというのはありますが。
リミットスイッチ用コネクタは10kΩでプルアップされているため、論理はActive Lowです。
設定できるならADC入力ピンとして使用可能かもしれない……?
エンコーダ用インターフェース
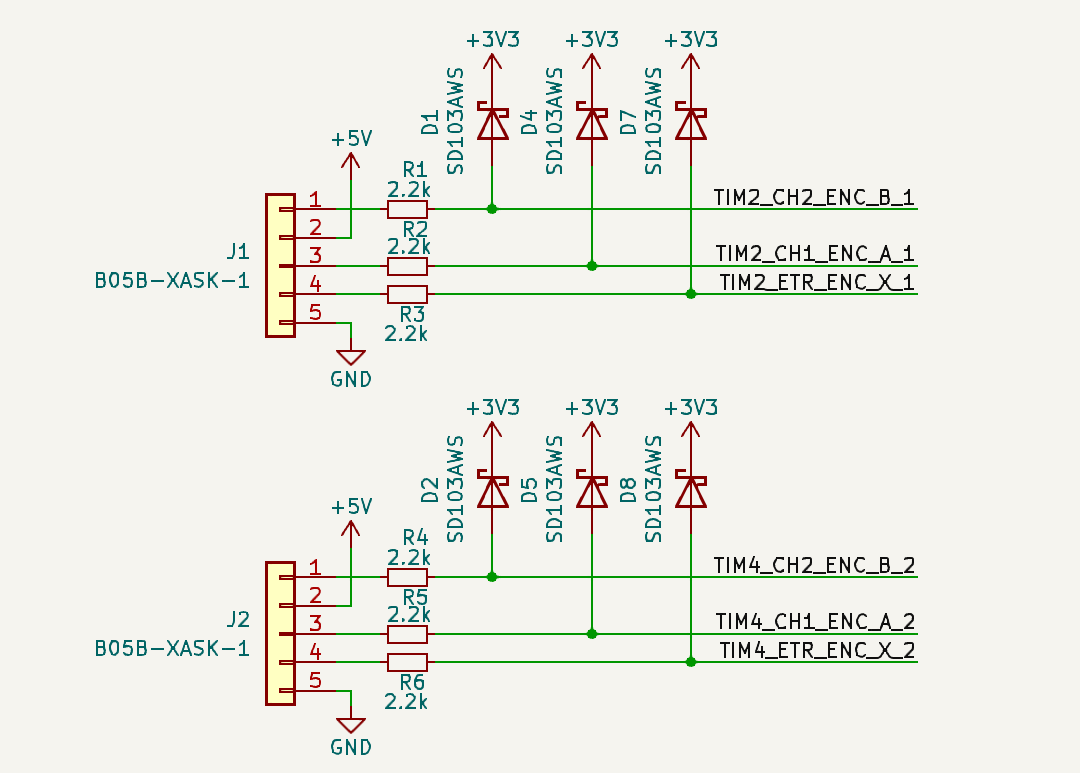
画像の通りです。抵抗+ダイオードクランプによって5VエンコーダをTTピン(not a 5v-torelant pin)に入力できます。
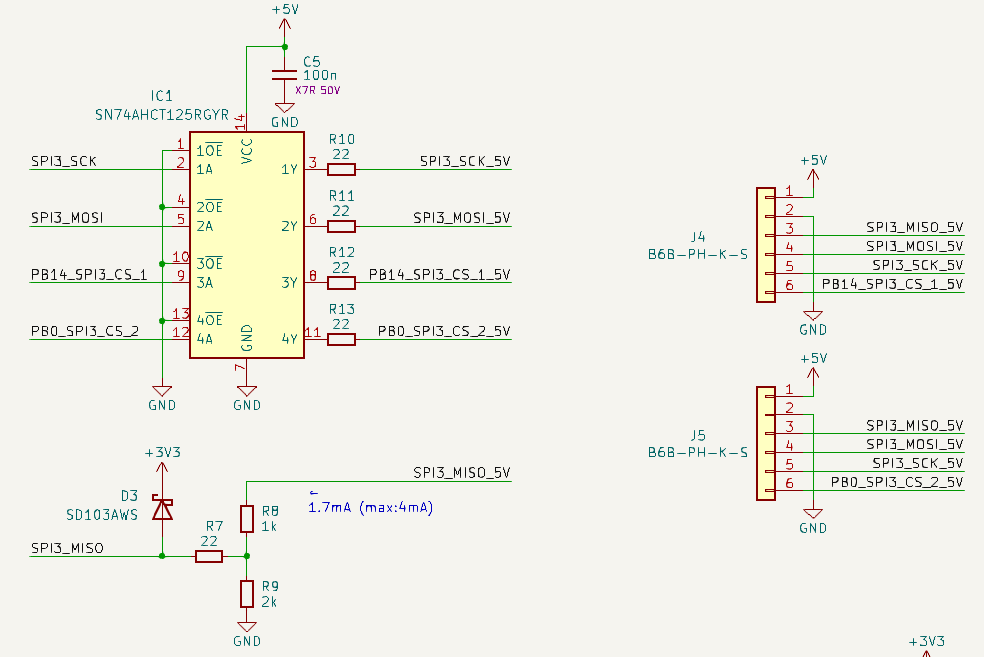
SPIエンコーダは磁気エンコーダのAS5047Pを想定しています。SPI接続用汎用インターフェースでもあるので、実はエンコーダではなくとも5Vレベルなら好きなものをつなげる……
電源レール
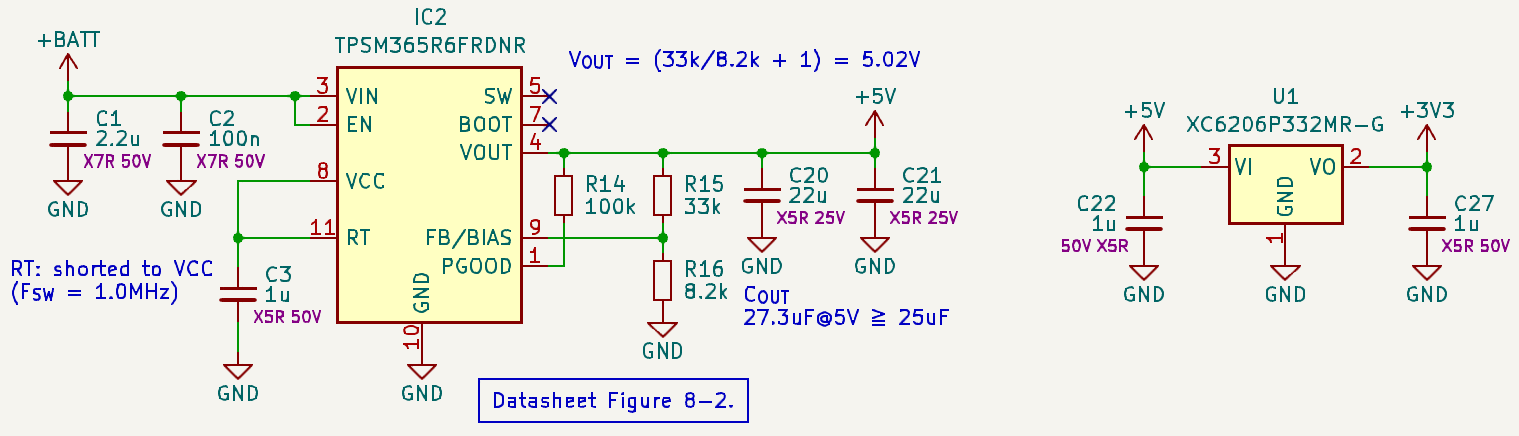
ハーフブリッジ、インダクタ両内蔵のDCDCコンバータICを使用しています。小型でおすすめです!(最近筆者はTPSM33625なるものを見つけてしまい……)
ベンチ台
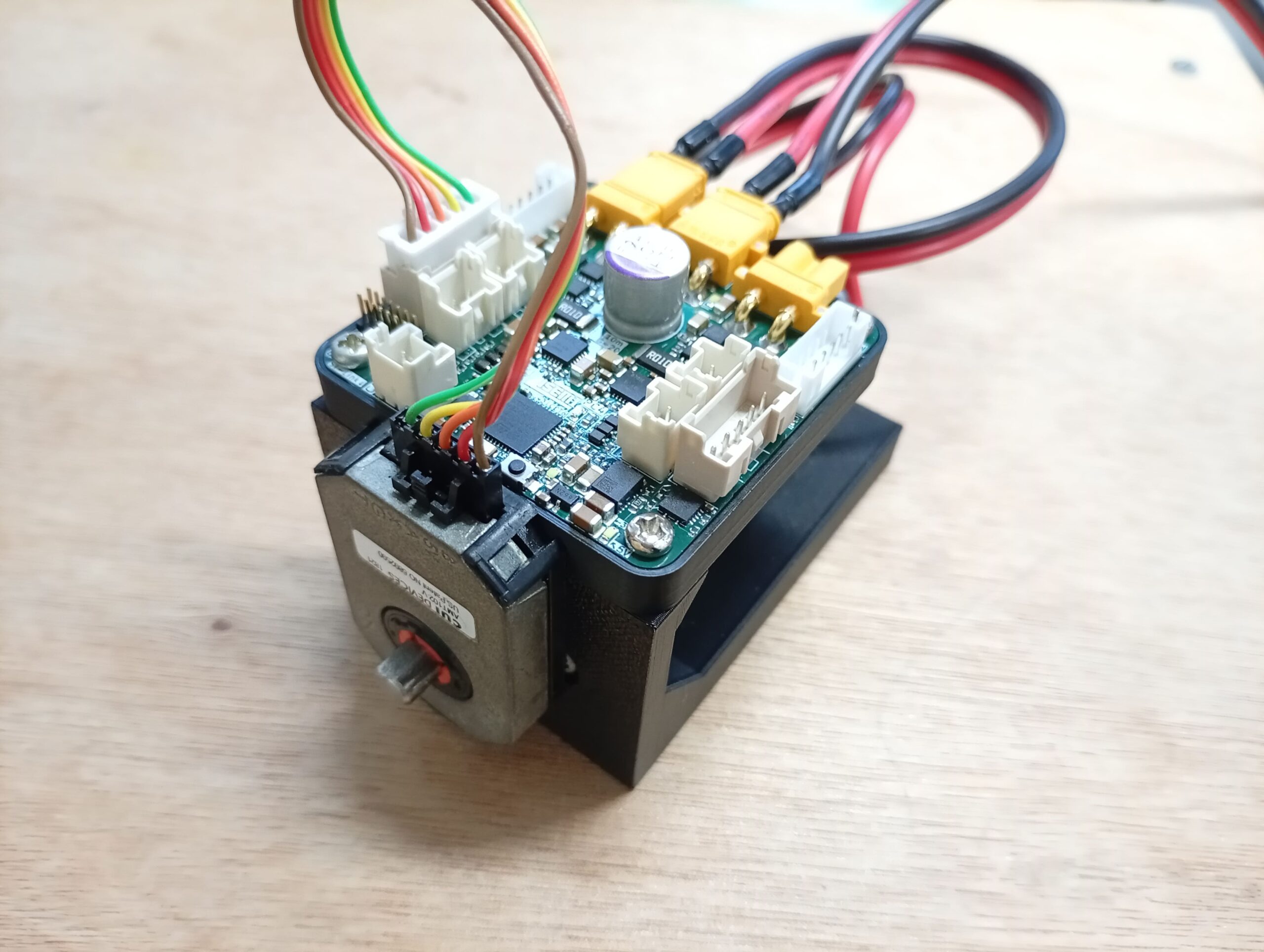
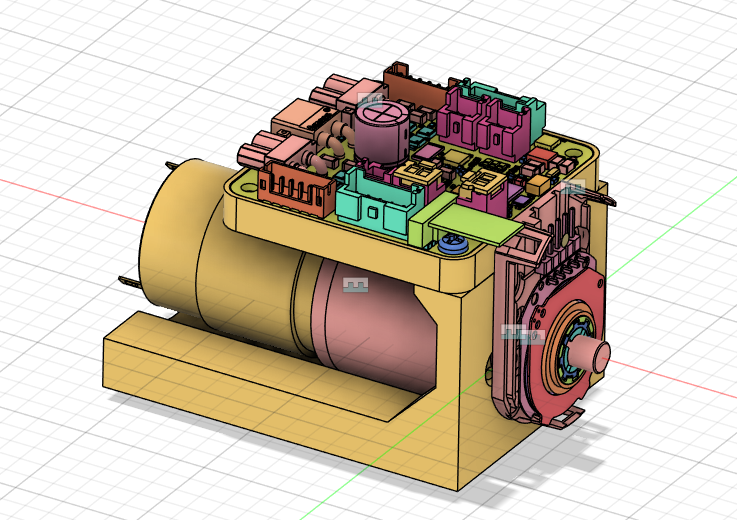
AMT102-Vを取り付けたRS-385PH(1:100)を接続した一式をつくってみました。
手実装部品
各種THTコネクタは手実装ですが、特にXAコネクタは少しでもずれると抜き差しができなくなるので位置合わせをしっかり行う必要があります。
C4は330uF 35Vや100uF 50Vなどを実装しておけばいいと思います。
未実装部品
裏面には3225Mサイズのコンデンサ用パッドが14個あります。
TVS用にSMCパッケージのパッドがあります。系統電圧に応じてTVSをつけることができます。
設計ファイル
以下のGoogle Driveより設計ファイル一式とベンチ台の設計をダウンロードできます。
使用ツールは KiCad 9.0.0 と Fusion です。
https://drive.google.com/file/d/1rdPu1AjjarHtHluNnHigOFKchEMXQvvY/view?usp=sharing
⚙️ 設計データの配布・ライセンスについて
本記事で紹介した回路図やPCBレイアウトなどのソースデータ一式は、ZIPファイルにて配布しています。ダウンロードされる際は、以下のライセンスおよび免責事項をご確認ください。
⚖️ ライセンス (CC BY-SA 4.0)
本設計データは クリエイティブ・コモンズ 表示 – 継承 4.0 国際 (CC BY-SA 4.0) ライセンスの下で公開しています。
- 適切なクレジット表記(原作者名「いむ @imuuu_u」やブログへのリンク)を行っていただければ、データの改変、フォーク基板の設計、製造、および商用利用(販売等)が可能です。
- 本データを改変したデータや、これをベースにした設計データを二次配布する場合は、必ず同じ「CC BY-SA 4.0」ライセンスで公開する必要があります。
⚠️ 免責事項
- 自己責任での利用: 本設計データは現状有姿で提供され、動作保証、特定の目的への適合性、または安全性について、明示・黙示を問わず一切の保証をいたしません。
- 事故・損害の免責: 本設計データの利用、またはそれに基づき製造したハードウェアの動作によって生じた、いかなる直接的・間接的損害、事故(回路の焼損、大電流による感電や火災、接続機器の破損、怪我など)についても、設計者は一切の責任を負いません。
- 検証の推奨: 電流経路の確保、絶縁クリアランス、パーツ選定等の最終的な安全性検証は、必ず利用者自身の責任において行ってください。