少々報告が遅れましたが,InRoF(仙台知能ロボコン)に出場した「チーム@2か月」です.
ちなみにチーム名の由来は2か月前から製作を開始したのではなく,
いろいろあって2か月前にチームが結成されたからです.製作はもっと前から行っています.
ちなみに,ロボットは多足と射出の2台で出ました!
結果は敗者復活戦で敗退...と思いきや疲れ果てていた時に審査員枠で2日目に出場決定
実行委員会から「もう1日徹夜してね」といわれて,頑張りました.
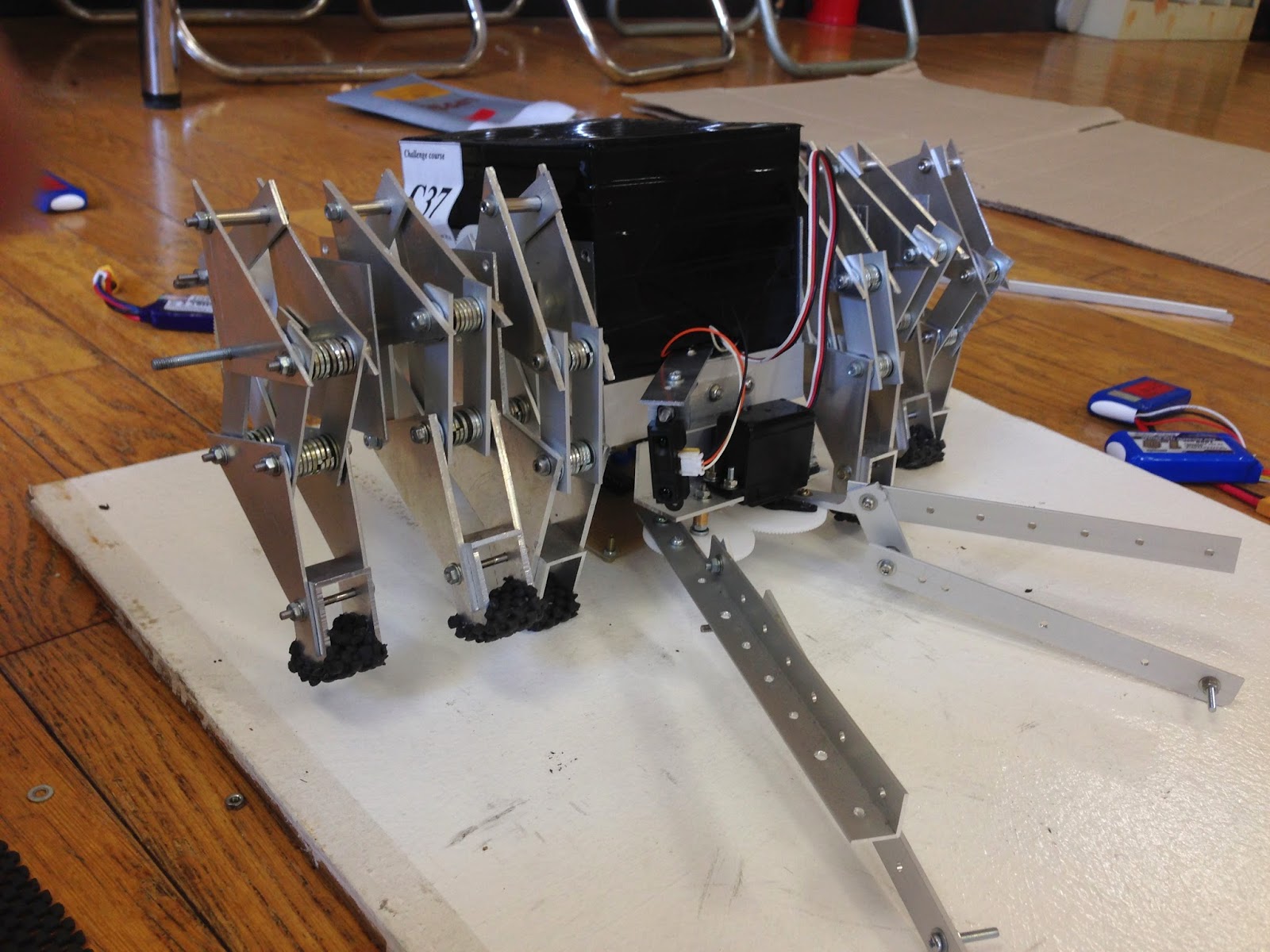
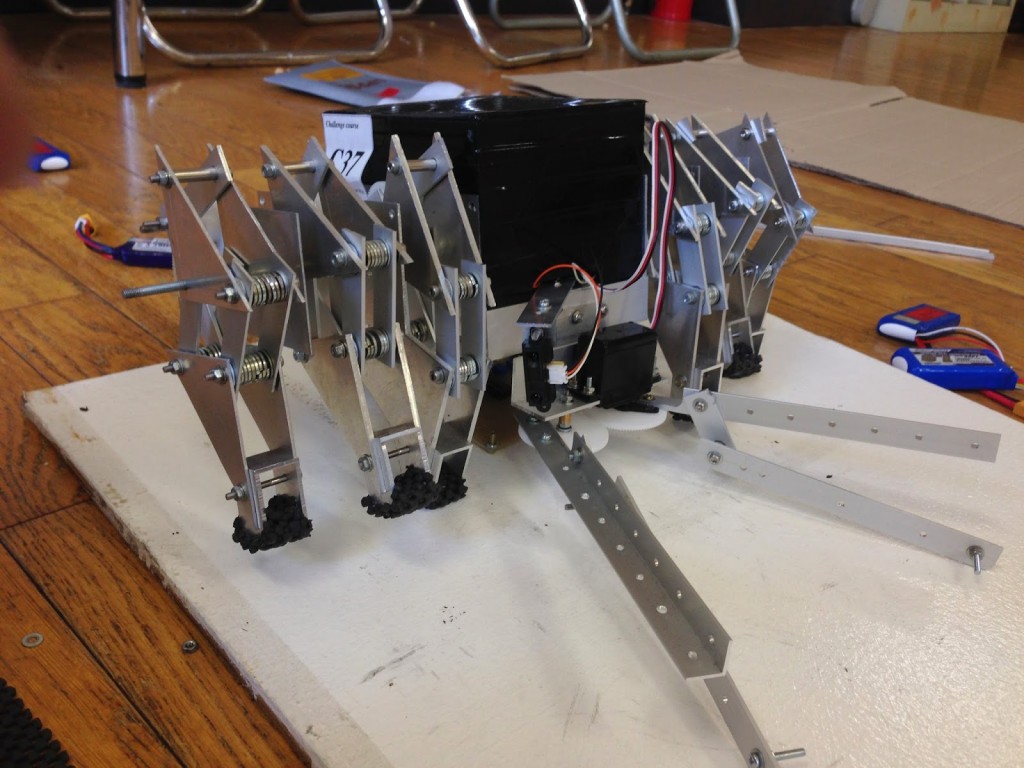
多足ロボットの説明としては,
足回りはテオ・ヤンセンのリンク機構を用いて歩行しました.
構成は足回り用にDCギヤヘッドモータ918Dシリーズ 24VDC 100:1を2つ,
ハンド用に標準サーボモータ Type2を1つ使用しました.
上下振動しても,ラインセンサーを読めるようにし,ハンドも対応できるようにしました.
フルパワーでモータを回すと足が速く動きすぎて,滑ってしまうので
普段はデューティ比30%で回しました......が,敗者復活戦で歯車が空回りしてしまい
制御ができなくなったのでリトライ後,100%で回しました.
観客は盛り上がったが,滑り止めが削れてゴミが出たり,
フィールドが汚れたりと運営側に迷惑をかけてしまう結果となってしまいました.
ちなみに1日目は4足,2日目は6足で出ました.下の写真は2日目大会前の写真です.
次に射出ロボットについて説明します.
とにかく速く走ってほしかったので,足回りにはオーバースペックぎみのタミヤ3633Kを使用しました.ギヤ比は36:1です.タイヤも大きめのものを使用したので大体秒速1.2mぐらい出ます.大会では最初の直線部分だけですが,秒速1mぐらい出していました.
ボール集めに関してはPSDでボールを発見してアームで拾うというシンプルなものでした.
ボールを拾った後の発射がこのロボットの見どころだったんですが,これが思った以上に難しかったです.方向さえ合っていればに発射したボールはゴールに入ると思っていたんですがそうはいきませんでした.
発射されたボールをネットが跳ね返してしまって得点にならないということが大会一日目の試走台で発覚.発射の威力が強すぎるとボールをネットがはねかえしてしまうし,弱すぎるとボールがフィールド中央の台をこえることができませんでした.
急いで発射の威力調整に入ったのですが,発射のためのタイヤの回転数をはかることは想定していなかったのでモータへのデューティと時間だけでの調整に...当然それでは安定してボールをいれることはできませんでした.
そこで一日目の夜発射のためのタイヤに白黒のビニールテープを貼付け,それをラインセンサで読む事で回転数をはかれるように改良しました.ただ二日目朝は忙しく,試走台でどの回転数が適切か試すことができずに本番へ.
結果ボールは1つしか入れられませんでした.
結果は残念でしたが,射出ロボットは,先輩方やチームメイトの協力のもとようやく作る事ができました.特に先輩方にはお忙しい時間を割いてガワを見直していただき,またアドバイスもたくさんいただきました.本当にありがとうございました.
